QGroundControl
QGroundControl 是一个应用程序来配置和飞行基于 PX4 的自动驾驶仪。 跨平台支持所有主流操作系统:
- 手机:安卓和 iOS(目前专注于平板电脑)
- 桌面:Windows,Linux,Mac OS
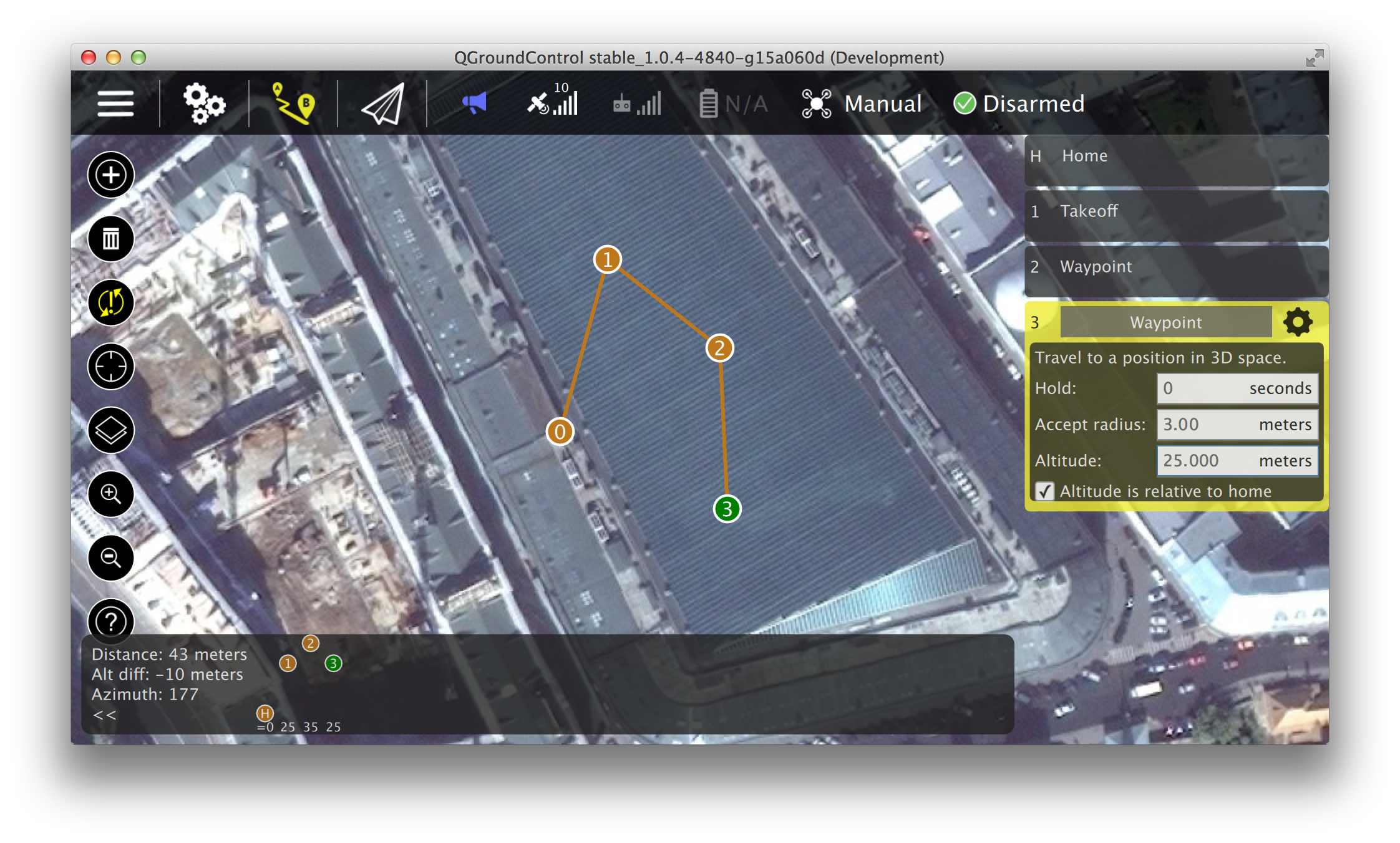
规划任务
要规划新任务,请切换到规划选项卡,单击左上角的 + 图标,然后单击地图创建航点。 在侧面打开一个上下文菜单来调整航点。 点击高亮传输图标,将任务发送到飞机上。
执行飞行任务
切换到最右侧的标签页。 地图上应该可以看到任务。 点击更改当前飞行模式下发到任务中,并且解锁飞机。 如果飞机已经起飞,它会飞到任务的第一段再执行。

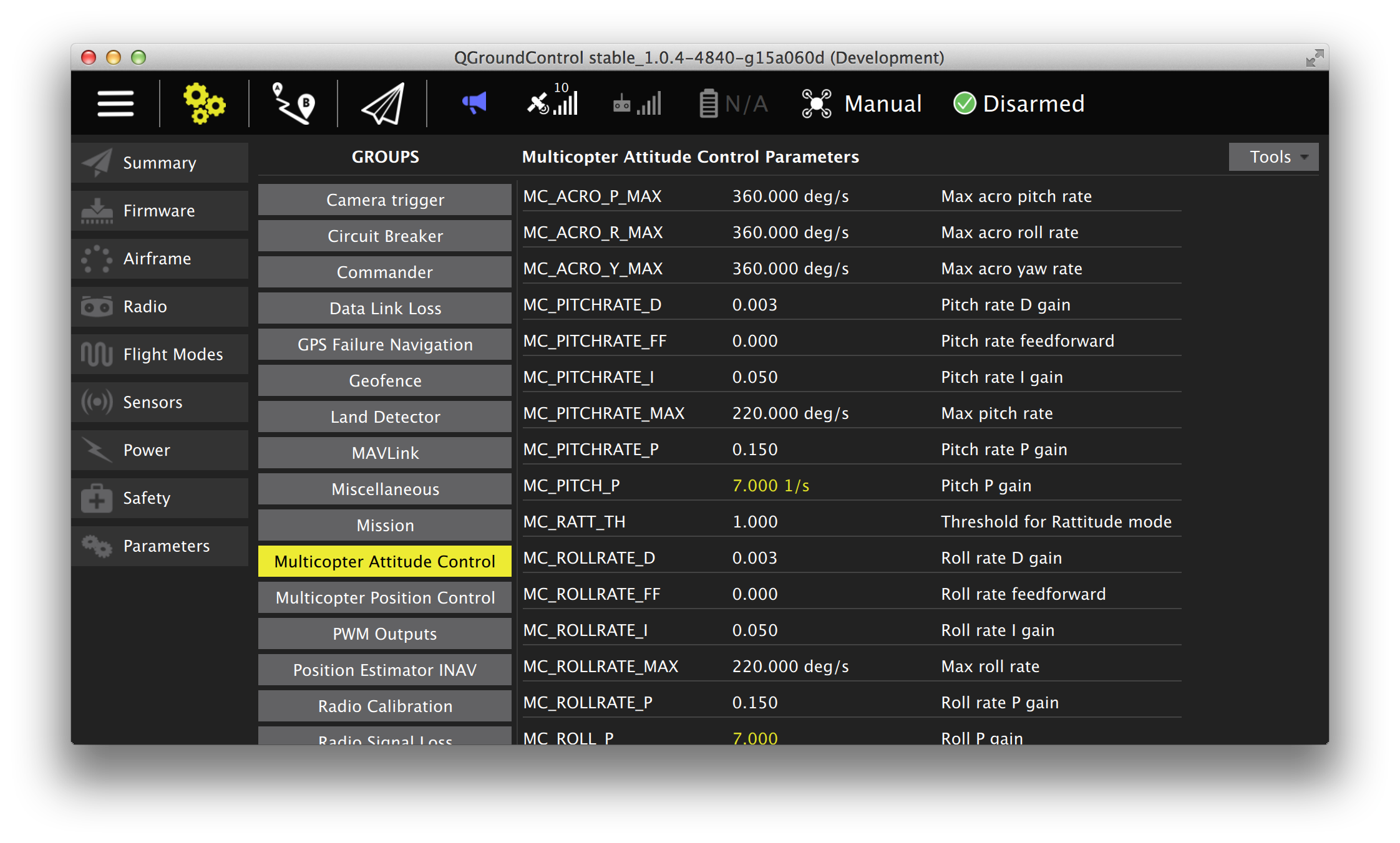
设置参数
切换到设置标签。 将左侧菜单拉到最下,点击参数图标。 参数可以通过双击来更改,这会打开一个带有详细描述的可编辑的文本菜单。
安装
QGroundControl 可以从 网站 下载。
推荐开发者使用最新编译版本替代稳定版。
由源代码安装
为了匹配最近版本的飞控代码,鼓励固件开发者从源码编译。
Follow the QGroundControl build instructions to install Qt and build the source code.