LightWare SF1XX Lidar
LightWare develops a range of light-weight, general purpose, laser altimeters ("Lidar") suitable for mounting on UAVs. These are useful for applications including terrain following, precision hovering (e.g. for photography), warning of regulatory height limits, anti-collision sensing etc.

PX4 supports the following LightWare Lidar rangefinders through the I2C bus (only):
- SF10/A (25 m)
- SF10/B (50 m)
- SF10/C (100m) (Discontinued)
- SF11/C (120 m)
- LW20 (100 m) - Waterproofed (IP67) with servo for sense-and-avoid applications
Configuring Lidar
Newer sensors/versions require no additional configuration.
Older sensors may be miss-configured to have an I2C address equal to
0x55(this conflicts withrgbledmodule). On Linux systems you may be able to determine the address using i2cdetect. If the I2C address is equal to0x66the sensor can be used with PX4.
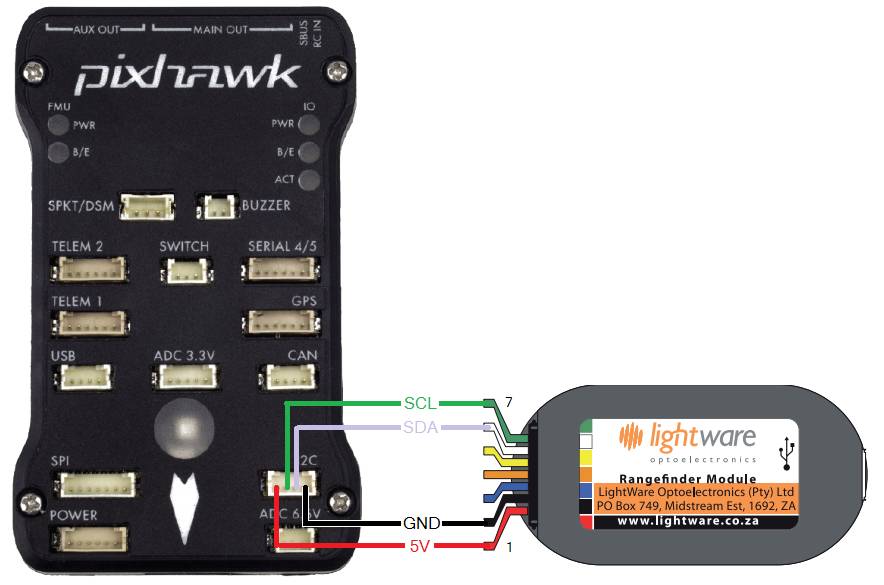
Hardware Setup
Connect the Lidar the autopilot I2C port as shown below (in this case, for the Pixhawk 1).
The PX4 driver for this rangefinder only supports I2C connections. You cannot use a UART etc.
Configuring PX4
The only configuration required is to set the type of the rangefinder. You can do this in QGroundControl Settings > Parameters.
Set the SENS_EN_SF1XX parameter to match the Lidar model and then reboot:
0lidar disabled1SF10/a2SF10/b3SF10/c4SF11/c5SF/LW20