파라미터 프로토콜(Parameter Protocol)
This content has not been fully reviewed since being ported from the old website (and may be out of date). Updates/re-validation welcome!
파라미터 프로토콜은 핵심 시스템 셋팅을 교환하고 전송을 보장하는데 사용합니다.
It can be both implemented on a microcontroller (e.g. the pxIMU with ARM7) and in standard software (e.g. px_multitracker process in Linux).
Supported Data Types
MAVLink (v1.0, v2.0) supports these data types:
uint32_t- 32bit unsigned integer (use the ENUM value MAV_PARAM_TYPE_UINT32)int32_t- 32bit signed integer (use the ENUM value MAV_PARAM_TYPE_INT32)float- IEEE754 single precision floating point number (use the ENUM value MAV_PARAM_TYPE_FLOAT)
All parameters are send as the float value of
mavlink_param_union_t, which means that a parameter should be byte-wise converted with this union to a byte-wise float (no type conversion). This is necessary in order to not limit the maximum precision for scaled integer params. E.g. GPS coordinates can only be expressed with single float precision up to a few meters, while GPS coordinates in 1E7 scaled integers provide very high accuracy.
mavlink_param_union_t param;
int32_t integer = 20000;
param.param_int32 = integer;
param.type = MAV_PARAM_TYPE_INT32;
// Then send the param by providing the float bytes to the send function
mavlink_msg_param_set_send(xx, xx, param.param_float, param.type, xx);
Multi-System and Multi-Component Support
MAVLink supports multiple systems / airplanes in parallel on the same link. In addition to this, it also supports multiple MAVLink-enabled devices in the same airplane. The protocol for example allows to communicate over one radio link with the autopilot and a payload unit. For this reason the parameter protocol also differentiates between components. To get a complete parameter list from a system, send the request parameter message with target_component set to 0 (enum value: MAV_COMP_ID_ALL). All onboard components should respond to parameter request messages with their ID or with ID MAV_COMP_ID_ALL (0).
QGroundControl by default queries all components of a system (it only queries the currently selected system, not all systems) and therefore sends ID 0 (
MAV_COMP_ID_ALL).
Graphical User Interface in QGroundControl
For this reason the parameter interface discriminates between systems (one system is one airplane) and components (one component is one entity in the architecture, e.g. the IMU or a Linux process). This allows to transparently access the individual component parameters without the need of a central onboard unit that translates the parameter read/write requests for the onboard components.
As can be seen on the image below, each component is represented by a top-level node in the parameter tree. The system (the MAV) can be selected in the top-level drop-down menu. The GUI keeps track of changed parameters will send those parameters which changed to the appropriate components.
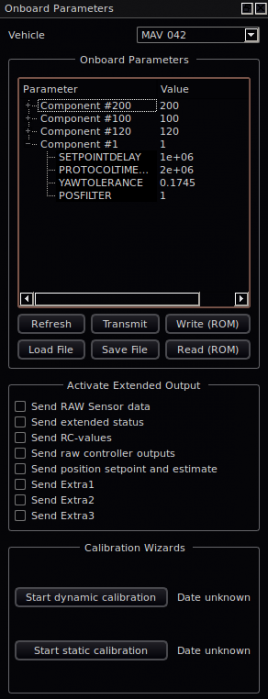
To facilitate the use of many parameters, the tree is structures at the top level according to the first underscore ("_") in the parameter name. So PID_POS_X_P and PID_POS_Y_P will be grouped below the PID node.
Communication / State Machine
The onboard parameters are identified by a 16-char string (without \0) and store a floating point (IEE 754 single-precision, 4 bytes) value. This key->value pair has many important properties:
- The human-readable name is very helpful for users, yet it is still small enough
- The GCS does not have to know in advance what onboard parameters exist
- Support for unknown autopilots, as long as they implement the protocol, is guaranteed
- Adding a parameter is only a change to the onboard code.
Read Parameters
Reading the parameter list is activated by sending the PARAM_REQUEST_LIST message. The onboard component should start to transmit the parameters individually after receiving this message. The sending should be delayed after each parameter, in order to not use up the full radio bandwidth.
Read Single Parameter
A single parameter can be read by the PARAM_REQUEST_READ message.
Write Parameters
As a GCS does not have its own list of the parameters on startup, before writing a parameter first the parameter list has to be read once. After that, parameters can be written individually by sending the key->value pair to the component. Provided the GCS keeps track of changed parameters, it will only need to transmit those which have changed in value. The Drone (MAV) has to acknowledge the write operation by emitting a PARAM_REQUEST_READ value message with the newly written parameter value.
QGroundControl Parameter Files
QGroundControl can save the current values of the onboard parameters in a text file. The file can then be imported again and transmitted to the Drone. This allows to e.g. configure several vehicles completely similar with safe default values.