Flight Modes Setup
The Flight Modes section allows you to map flight modes to radio channel(s), and hence to the switches on your radio control transmitter. Both flight mode setup and the available flight modes are different in PX4 and ArduPilot (and there are some differences between ArduCopter and ArduPlane).
To access this section, select the Gear icon (Vehicle Setup) in the top toolbar and then Flight Modes in the sidebar.
You must already have configured your radio in order to set flight modes.
Flight modes provide different levels of autopilot-assisted flight, and fully autonomous flight via missions or offboard (API-based) control. Different flight modes allow new users to learn flying with a more forgiving platform than provided by basic RC control alone. They also enable automation of common tasks like taking off, landing and returning to the original launch position.
For more information about the flight modes on each platform see:
ArduPilot Flight Mode Setup
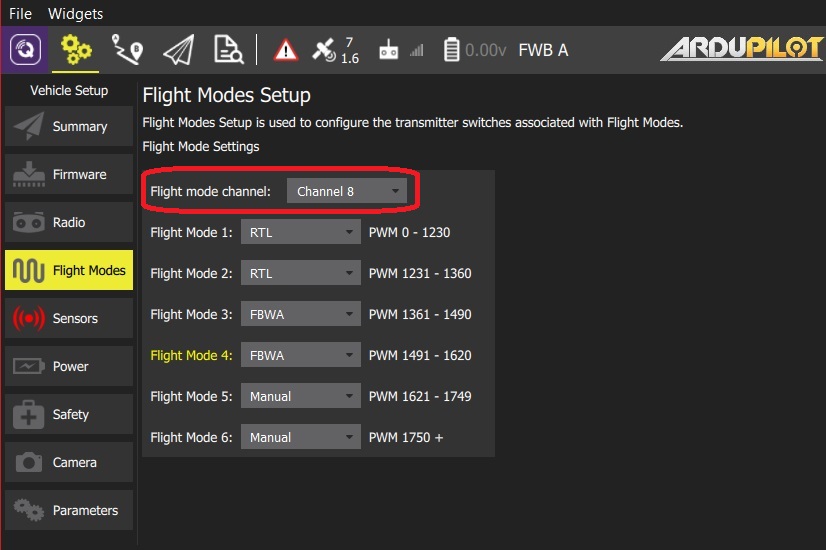
On ArduPilot you can assign up to 6 different flight modes to a single channel of your transmitter (the channel is selectable on Plane, but fixed to channel 5 on Copter).
ArduCopter (only) also allows you to specify additional Channel Options for channels 7-12. These allow you to assign functions to these switches (for example, to turn on a camera, or return to launch). There is additional information about channel configuration in the ArduCopter docs: [Auxiliary Function Switches](
To set the flight modes:
- Turn on your RC transmitter.
Select the Gear icon (Vehicle Setup) in the top toolbar and then Flight Modes in the sidebar.
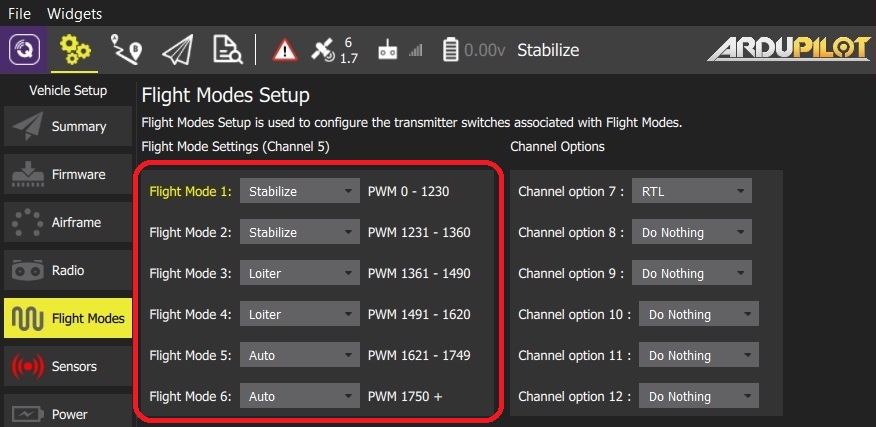
The above image is a screenshot of the flight mode setup for ArduCopter.
Select up to 6 flight modes in the drop downs.
- ArduCopter only: Select additional Channel Options for channels 7-12.
ArduPlane only: Select the mode channel from the dropdown.
- Test that the modes are mapped to the right transmitter switches by selecting each mode switch on your transmitter in turn, and check that the desired flight mode is activated (the text turns yellow on QGroundControl for the active mode).
All values are automatically saved as they are changed.
The ArduCopter screenshot above shows a typical setup for a three position flight mode switch with an additional option of RTL being on a channel 7 switch. You can also setup 6 flight modes using two switches plus mixing on your transmitter. Scroll down to the center section of this page for tutorials on how to do that.
PX4 Pro Flight Mode Setup
PX4 (QGroundControl) supports two modes for mapping flight modes to transmitter switches/dials:
- Single Channel Mode Selection: Assign up to 6 flight modes to switch positions encoded in a single channel.
- Multi Channel Mode Selection: Assign modes to switch positions encoded in one or more channels. Some modes are hard coded to share channels, or are defined/set automatically based on other mode selections (the behaviour of multi-channel mode selection can sometimes be confusing).
The recommended approach is use Single Channel Mode Selection because it easy to understand and configure. It is similar to the approach used by ArduPilot.
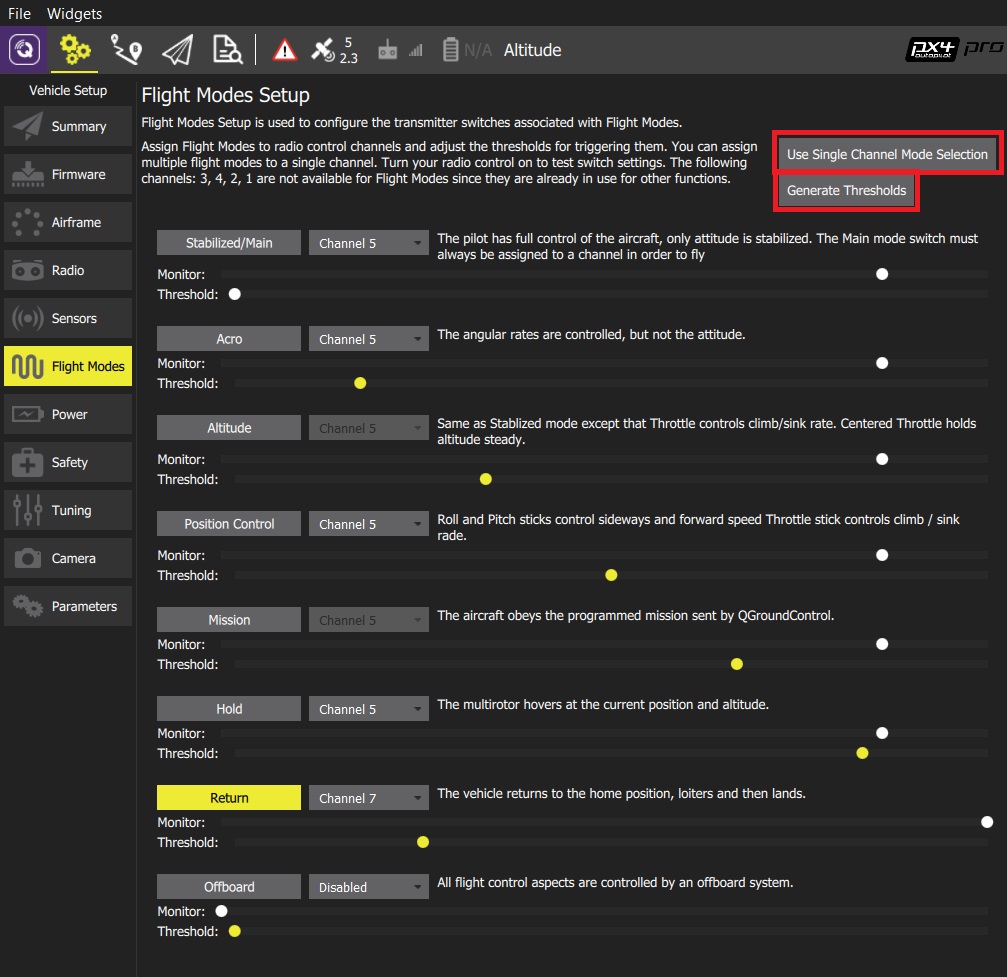
Single-Channel Mode
The single-channel selection mode allows you to specify a "mode" channel and select up to 6 flight modes that will be activated based on the PWM value of the channel. You can also separately specify channels for mapping a kill switch, return to launch mode, and offboard mode.
In order to use approach you will first need to configure your transmitter to encode the physical positions of your mode switch(es) into a single channel. There is a video guide of how this is done for the popular Taranis transmitter below (check your documentation if you use a different transmitter).
To configure single-channel flight mode selection:
- Turn on your RC transmitter.
Select the Gear icon (Vehicle Setup) in the top toolbar and then Flight Modes in the sidebar.
If the screen opens in Multi Channel Mode click the Use Single Channel Mode Selection button to change screen.
Specify Flight Mode Settings:
- Select the Mode channel (above this shown as Channel 5, but this will depend on your transmitter configuration).
- Select up to six Flight Modes.
- Specify Switch Settings:
- Select the channels that you want to map to specific actions - e.g. Return mode, Kill switch, offboard mode, etc. (if you have spare switches and channels on your transmitter).
- Test that the modes are mapped to the right transmitter switches:
- Check the Channel Monitor to confirm that the expected channel is changed by each switch.
- Select each mode switch on your transmitter in turn, and check that the desired flight mode is activated (the text turns yellow on QGroundControl for the active mode).
All values are automatically saved as they are changed.
Video Example (including Transmitter Setup)
It is common to use the positions of a 2- and a 3-position switch on the transmitter to represent the 6 flight modes, and encode each combination of switches as a particular PWM value for the mode that will be sent on a single channel.
The video below shows how this is done with the FrSky Taranis transmitter (a very popular and highly recommended RC transmitter). The process involves assigning a "logical switch" to each combination of positions of the two real switches. Each logical switch is then assigned to a different PWM value on the same channel.
The video then shows how to use QGroundControl to specify the mode channel and map modes to each of the 6 "slots".
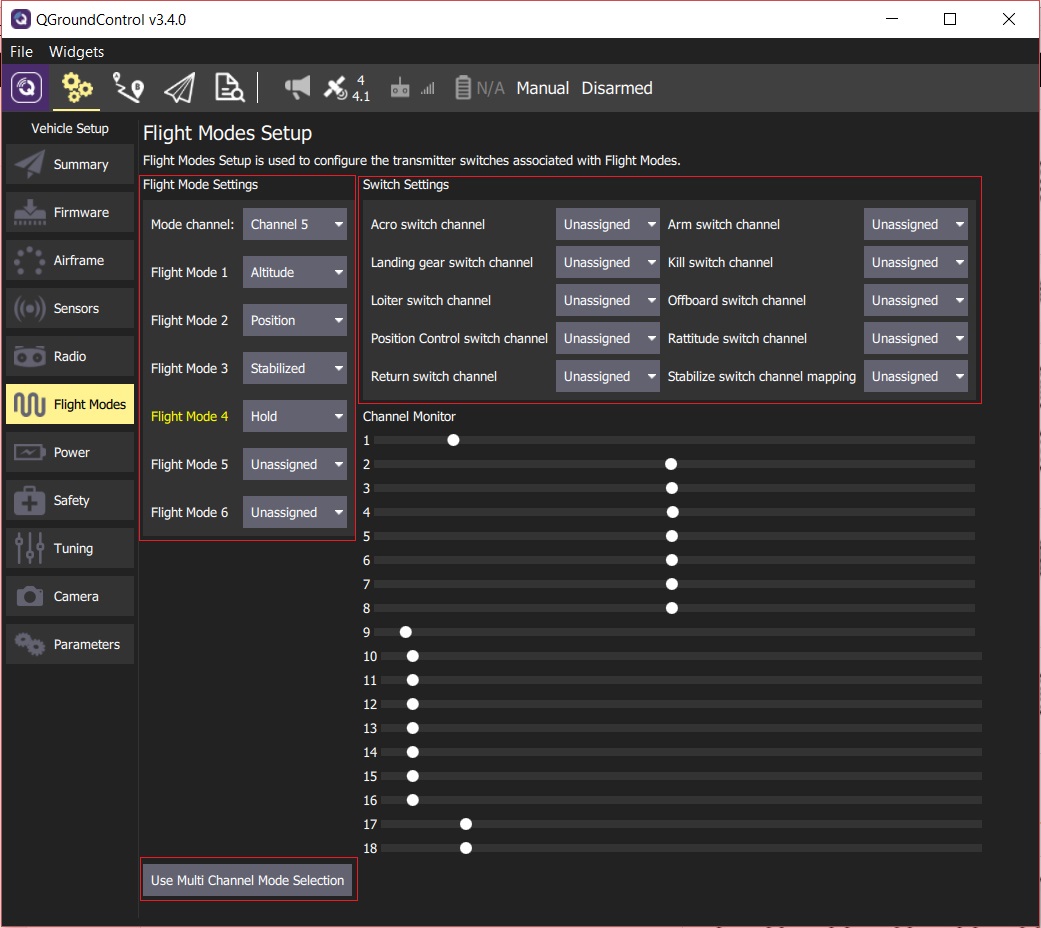
Multi-Channel Mode
We recommend you use Single Channel Flight Mode selection because the Multi Channel selection user interface can be confusing. If you do choose to use this method, then the best approach is to start assigning channels and take note of information displayed by QGroundControl following your selection.
The multi-channel selection UI allows you to map one or more modes to one or more channels. There are some modes (and hence switches) that must always be defined, and the channel to which they must be allocated.
To configure flight modes using the multi-channel UI:
- Turn on your RC transmitter.
Select the Gear icon (Vehicle Setup) in the top toolbar and then Flight Modes in the sidebar.
If the screen opens in Single Channel Mode click the Use Multi Channel Mode Selection button to change screen.
Select the modes you want to assign to your switches and select the associated channel (selected modes will move in the UI to be grouped by channel). There are a number of complications on the mode to channel assignments:
- Some modes will have a grayed out channel selector because they cannot be disabled and you cannot directly set the value. For example:
- Mission mode - Has the same channel number as Hold (if it is defined), or otherwise the same channel as Stabilized/Main mode.
- Altitude mode - Has the same channel number as Position Control (if it is defined), or otherwise the same channel as Stabilized/Main mode.
- Assist mode - This mode is added to the same channel as Stabilized/Main mode if (and only if) Position Control is enabled and defined on a different channel than Stabilized/Main.
- Some modes will have a grayed out channel selector because they cannot be disabled and you cannot directly set the value. For example:
- Click the Generate Thresholds button.
- This will automatically create threshold values for all modes, spread evenly across each channel for its assigned modes. For example, in the mode assignment shown above, most modes are assigned to mode 5, and you can see that the channel thresholds for each mode are spread evenly across the channel.
This mode is demonstrated in the PX4 setup video @6m53s (youtube).
This flight mode selection mechanism is relatively complicated due to the way that PX4 works out which mode should be selected. You may be able to gain some insight from this flow chart (PX4 Developer Guide).