PX4 平台硬件/软件结构
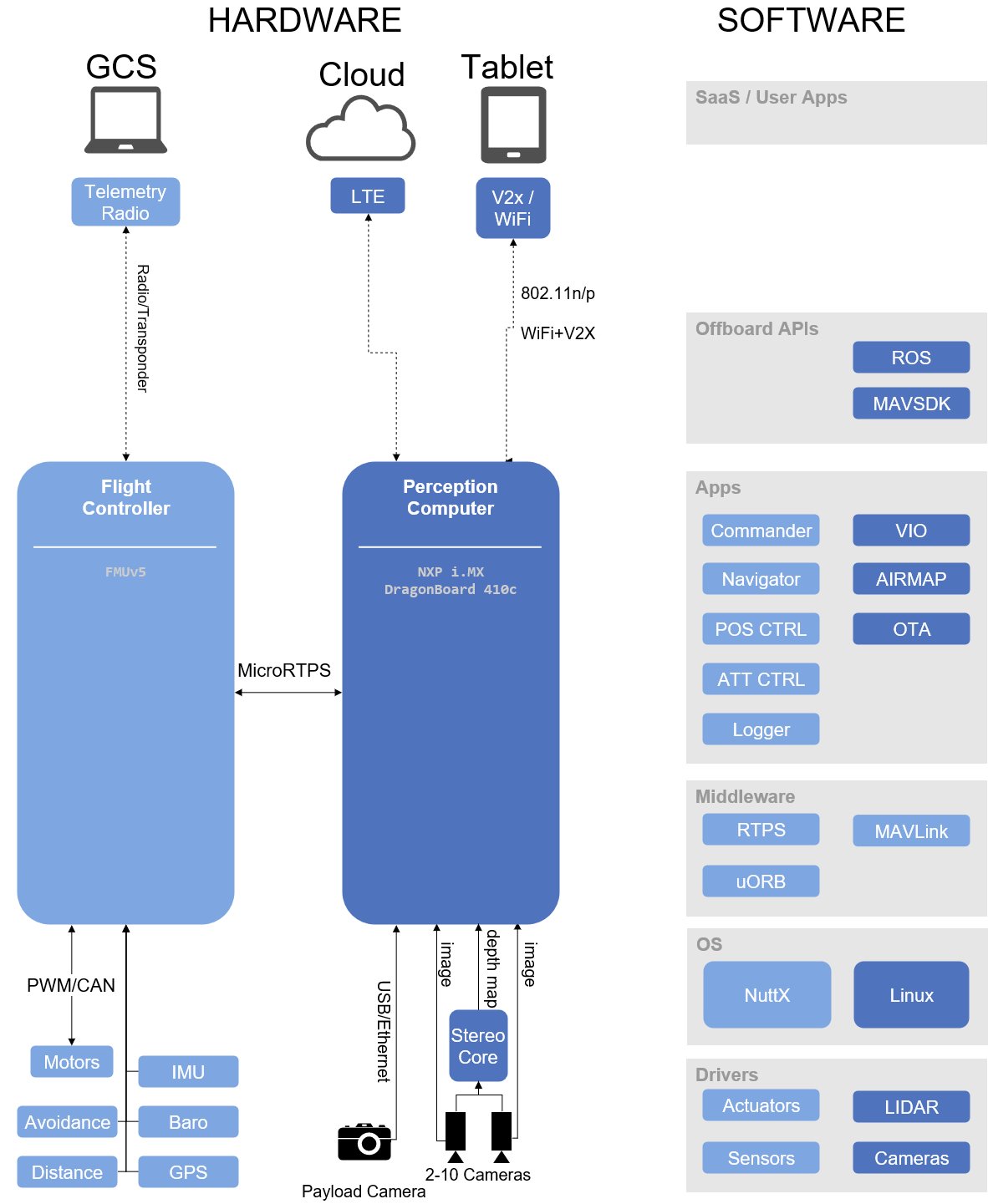
下面的图表提供了对完整的PX4号板载和离线堆栈的前瞻性高层概览。 图的左侧展示的是一种可能的 飞行控制器 (flight controller) (亮蓝色)通过 RTPS 与 视觉感知计算机(perception computer) (深蓝色) 相连接的硬件配置。 感知计算机配备一个单独的相机载荷,并使用相机传感器阵列提供视觉控制和目标回避功能。
图的右侧显示了端到端的软件堆栈。 堆栈 "近似" 与关系图的硬件部分水平对齐, 并使用颜色进行了编码以显示哪些软件在飞行控制器上运行、哪些软件在配套计算机上运行。
PX4 Architectural Overview 页面提供了有关飞行控制栈和中间件的相关信息。 Offboard API 的相关内容见 ROS 和 DroneCore 。