硬件在环仿真(HITL)
硬件在环仿真模式 (HITL 或 HIL) 下 PX4 固件代码运行在真实的飞行控制器硬件平台上。 这种方法的优点是可以在实际硬件上测试大多数的实际飞行代码。
PX4 supports HITL for multicopters (using jMAVSim or Gazebo) and VTOL (using Gazebo).
HITL兼容机架
目前兼容的机架构型和模拟器的情况如下:
| 机架 | SYS_AUTOSTART |
Gazebo | jMAVSim |
|---|---|---|---|
| HIL Quadcopter X | 1001 | Y | Y |
| HIL Standard VTOL QuadPlane | 1002 | Y | |
| Generic Quadrotor x copter | 4001 | Y | Y |
| DJI Flame Wheel f450 | 4011 | Y | Y |
HITL 仿真环境
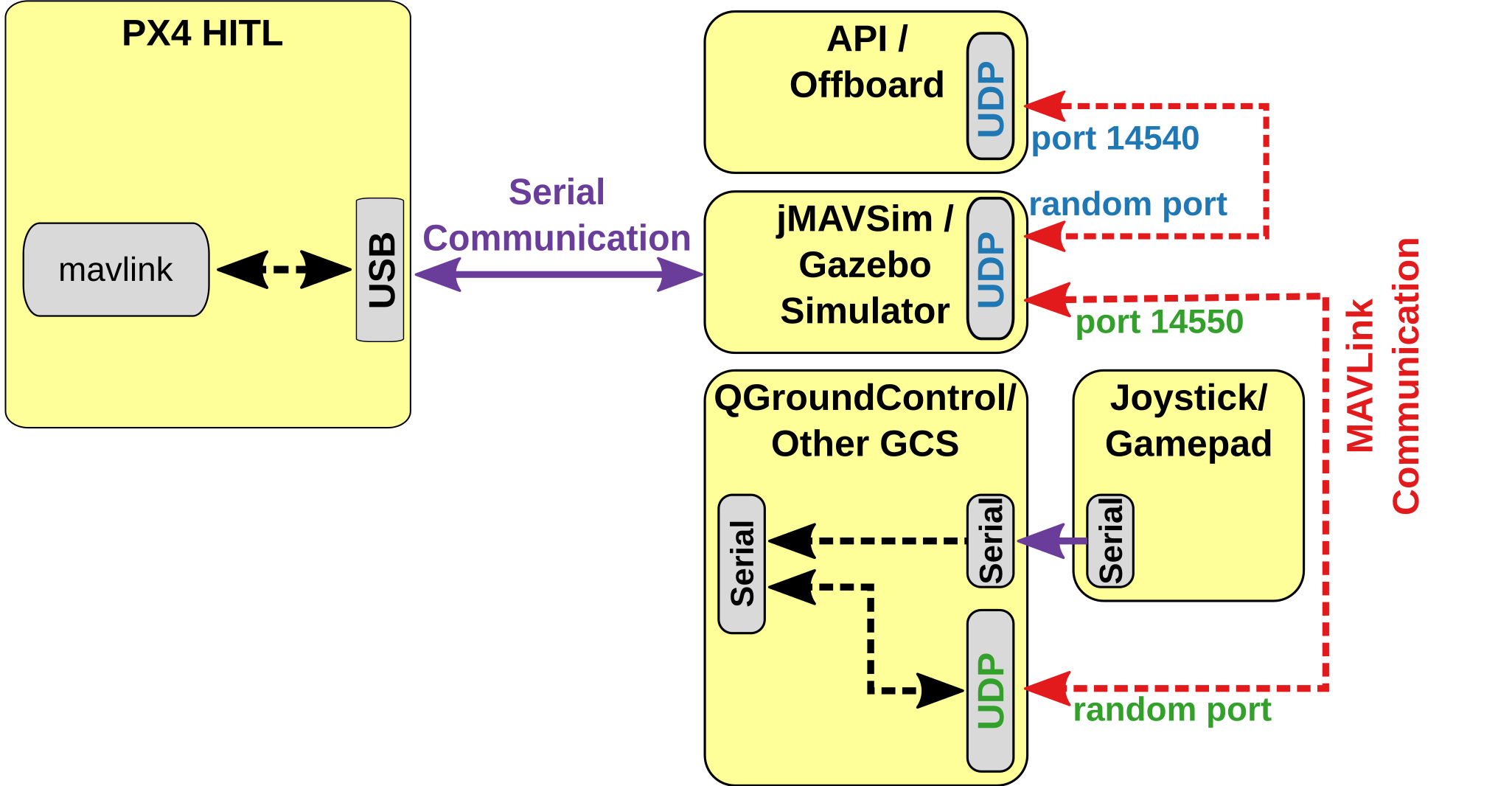
硬件在环仿真(HITL)模式下标准的 PX4 固件在真实的硬件上运行。 JMAVSim 或 Gazebo (运行在开发计算机上) 通过 USB或者串口 完成与飞行控制器硬件平台连接。 模拟器充当在 PX4 和 QGroundControl 之间共享 MAVLink 数据的网关。
如果飞行控制器支持网络连接且使用的是稳定、低延迟的连接(如有线以太网,WIFI 通常不太稳定),那么模拟器也可以使用 UDP 完成通讯连接。 例如,该配置已经使用一台运行 PX4 且通过以太网连接到开发计算机的 Raspberry Pi 进行了验证测试 (包括 jMAVSim 运行命令的启动配置在 这里)。
下面展示了仿真模拟的环境:
- 飞控板 HITL 模式被激活 (通过 QGroundControl) ,该模式下不会启动飞控板上任何传感器。
- jMAVSim 或者 Gazebo 通过 USB 连接到飞控板。
- 模拟器通过 UDP 连接到 QGroundControl 并将 MAVLink 数据传输至 PX4 。
- Gazebo和jMAVSim也可以连接到 offboard API和桥接MAVLink消息到 PX4。
- (可选) 通过串口可将操纵杆/游戏手柄通过 QGroundControl 连接至仿真回路中。
HITL 相比于 SITL
SITL 开发计算机中的模拟环境中运行, 并使用专门为该环境生成的固件。 除了通过模拟器提供模拟环境数据的模拟驱动数据以外,系统正常运作的其他驱动数据。
与此相对照,HITL 在正常硬件上运行正常的 PX4 固件。 仿真数据进入整个仿真系统的时间点与 SITL 有所不同。 commander 和传感器等核心模块在启动时有HITL 模式,这种模式绕过了某些正常功能。
总而言之, HITL 在真实硬件上运行标准 PX4 固件,而 SITL 实际上要比标准 PX4 系统执行更多的代码。
配置 HITL
PX4配置
- 通过 USB 将自动驾驶仪直接连接到 QGroundControl。
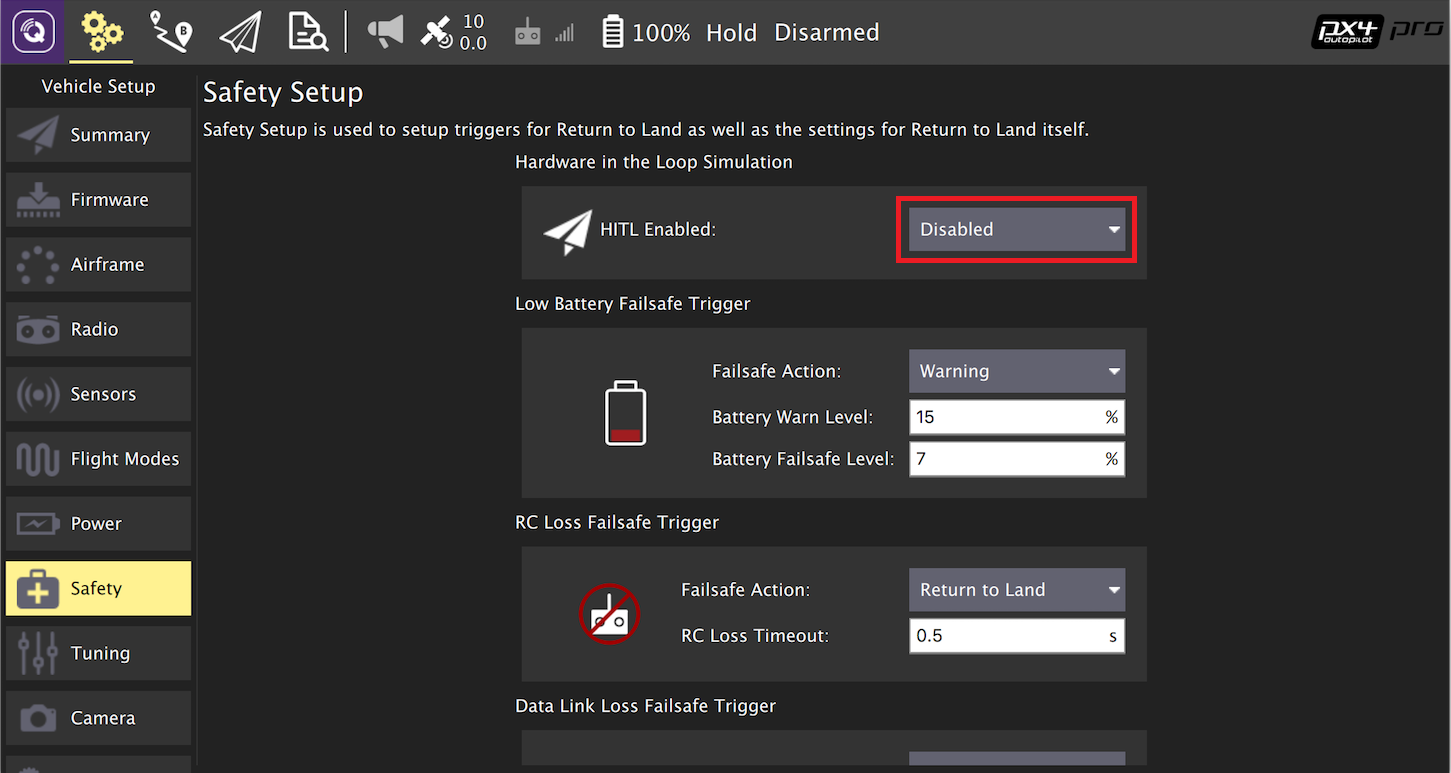
激活 HITL 模式
- 打开 Setup > Safety 选项卡。
在 HITL Enabled 下拉框中选择 Enabled 完成 HITL 模式的激活。
选择机架
- 打开 Setup > Airframes 选项卡。
选择一个你想要进行测试的 兼容的机架 。 Then click Apply and Restart on top-right of the Airframe Setup page.

如有必要, 校准您的 RC 遥控器 或操纵杆。
设置 UDP
在设置菜单的 "General" 选项卡下, 取消选中 AutoConnect 一栏中除 UDP 外的所有复选框。

(可选) 配置操纵杆和故障保护。 Set the following parameters in order to use a joystick instead of an RC remote control transmitter:
- COM_RC_IN_MODE 更改为 "Joystick/No RC Checks". 这允许操纵杆输入并禁用 RC 输入检查。
NAV_RCL_ACT to "Disabled". 这可确保在没有无线遥控的情况下运行 HITL 时 RC 失控保护不会介入。
完成所有的配置设定后 关闭 QGroundControl 并断开飞控板与计算机的连接。
模拟器特定设置
在以下章节中按照特定模拟器的适当设置步骤。
Gazebo
确保 QGroundControl 没有运行!
使用 Gazebo 构建PX4 (用于构建Gazebo 插件)。
cd <Firmware_clone> make px4_sitl_default gazebo打开飞行器模型的 sdf 文件(例如 Tools/sitl_gazebo/models/iris/iris.sdf)。
找到文件的
mavlink_interface plugin分区,将serialEnabled和hil_mode参数更改为true。
iris.sdf文件时自动生成的。 因此,您需要保存您修改过的文件的副本,或者为每个版本重新编辑。
如有必要的话替换掉
serialDevice参数 (/dev/ttyACM0) 。串口设备参数取决于载具与计算机使用哪个端口完成连接 (通常情况下都是
/dev/ttyACM0)。 在 Ubuntu 上最简单的一个检测办法就是将自驾仪插入电脑,然后打开终端窗口输入dmesg | grep "tty"命令。 命令执行结果中最后一个显示的设备就是我们关心的。设置环境变量
source Tools/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default在 HITL 模式下运行 Gazebo ::
gazebo Tools/sitl_gazebo/worlds/iris.world启动QGroundControl。 它应该会自动连接 PX4 和 Gazebo 。
jMAVSim (Quadrotor only)
确保 QGroundControl 没有运行!
- 将飞行控制器连接到计算机, 并等待其启动。
在 HIL 模式下运行 jMAVSim
sh ./Tools/jmavsim_run.sh -q -d /dev/ttyACM0 -b 921600 -r 250Note 酌情替换序列端口名称
/dev/ttyACM0。 在 macOS 上,这个端口将是/dev/tty.bankmodem1。 在 Windows 上(包括Cygwin) 它将是 COM1 或另一个端口 - 请检查 Windows 设备管理器中的连接。- 开启 QGroundControl。 它应该会自动连接 PX4 和 Gazebo 。
在 HITL 仿真中执行自主飞行任务
你可以使用 QGroundControl 实现对飞机的控制并令其 执行飞行任务 。