使用侦听器命令进行传感器/主题调试
uORB 是用于进程间通信的异步 publish()/subscribe() 消息传递 API。 listener 命令可从 QGroundControl 的 MAVLink 控制台 中用于检查主题(消息)值,包括传感器发布的当前值。
之所以是非常有用的调试工具是因为可以在 QGC 上通过无线连接(比如飞机在飞行过程中)。
The
listenercommand is also available through the System Console and the MAVLink Shell.
listener命令仅适用于基于 Nuttx 的系统(Pixhawk、Pixracer 等)和 Linux/OS X。
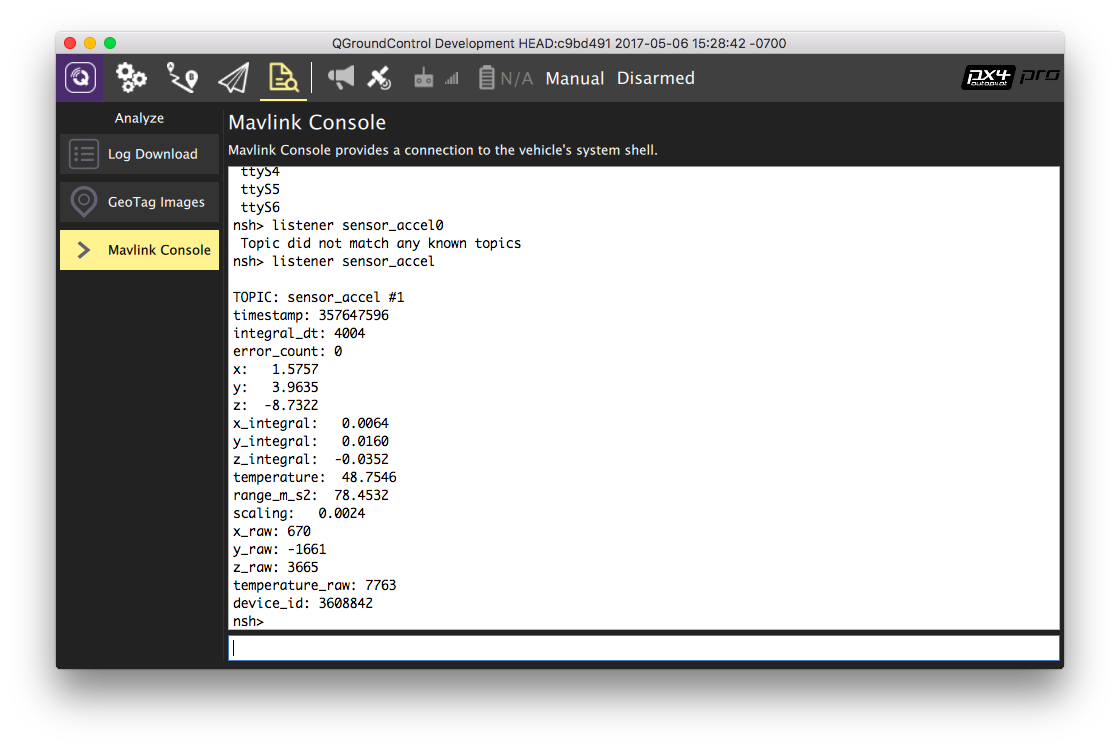
下图演示了 QGroundControl 用于获取加速度传感器值。
有关如何确定可用的主题以及如何调用 listener 的详细信息,请参阅:uORB 消息列表主题和侦听 。