Finding/Updating Parameters
PX4 behaviour can be configured/tuned using parameters (e.g. Multicopter PID gains, calibration information, etc.).
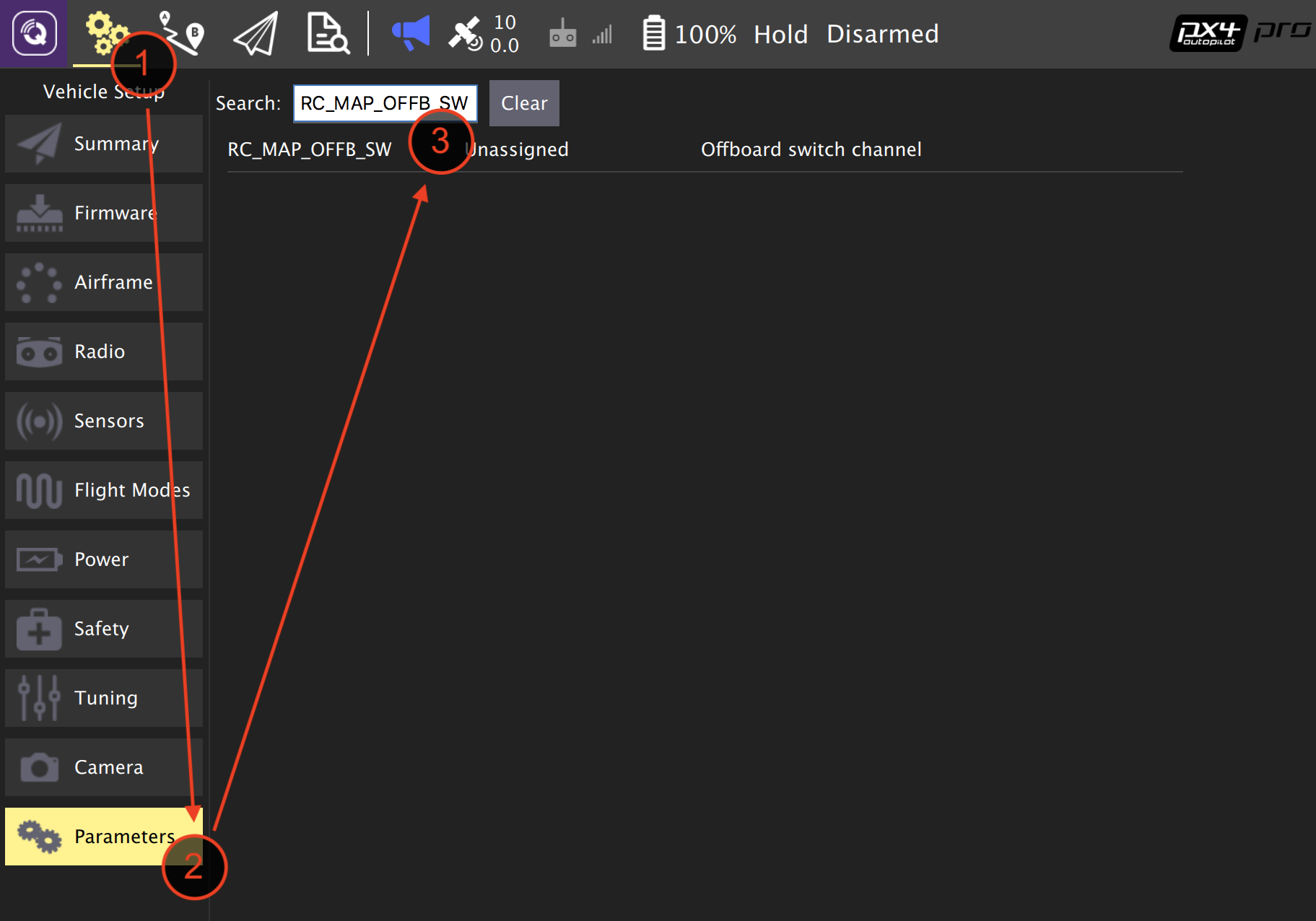
The QGroundControl Parameters screen allows you to find and modify any of the parameters associated with the vehicle. 通过单击边栏中的顶部菜单 齿轮 图标, 然后 参数(Parameters) , 就可以访问参数设置的页面。
Most of the more commonly used parameters are more conveniently set using the dedicated setup screens described in the Basic Configuration section. The Parameters screen is needed when modifying less commonly modified parameters - for example while tuning a new vehicle.
While some parameters can be changed in flight, this is not recommended (except where explicitly stated in the guide).
Finding a Parameter
可以通过在 搜索(Search) 框中输入一个相关字眼来搜索参数。 和搜索字眼相关的所有参数名称和说明将会以列表形式显示 (按 清除(Clear) 重置搜索)。
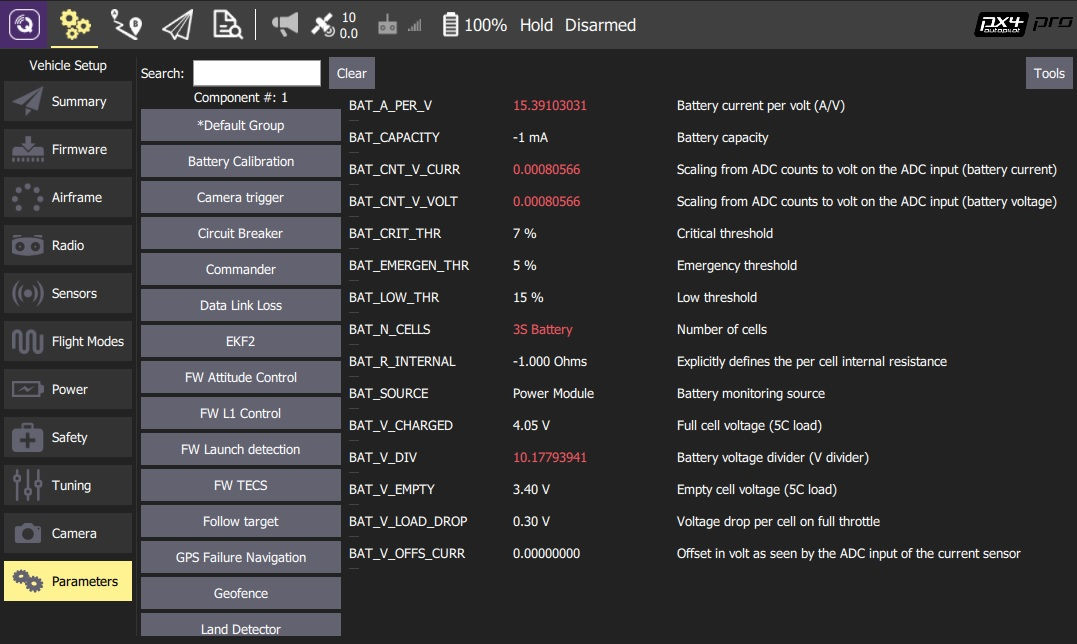
你也可以按组浏览参数, 方法是单击左侧的按钮 (在选中 电池校准(Battery Calibration) 下的图像中)。
If you can't find an expected parameter, see the next section.
Missing Parameters
Parameters are usually not visible because either they are conditional on other parameters, or they are not present in the firmware (see below).
Conditional Parameters
A parameter may not be displayed if it is conditional on another parameter that is not enabled.
You can usually find out what parameters are conditional by searching the full parameter reference and other documentation. In particular serial port configuration parameters depend on what service is assigned to a serial port.
Parameter Not In Firmware
A parameter may not be present in the firmware because you're using a different version of PX4 or because you're using a build in which the associated module is not included.
New parameters are added in each PX4 version, and existing parameters are sometimes removed or renamed. You can check whether a parameter should be present by reviewing the full parameter reference for the version you're targeting. You can also search for the parameter in the source tree and in the release notes.
The other reason that a parameter might not be in firmware is if its associated module has not been included. This is a problem (in particular) for FMUv2 firmware, which omits many modules so that PX4 can fit into the 1MB of available flash. There are two options to solve this problem:
- Check if you can update your board to run FMUv3 firmware, which includes all modules: Firmware > FMUv2 Bootloader Update
If your board can only run FMUv2 firmware you will need to rebuild PX4 with the missing modules enabled. You can see these commented out in boards/px4/fmu-v2/default.cmake:
DRIVERS adc #barometer # all available barometer drivers barometer/ms5611 #batt_smbus #camera_capture >Note You may also need to disable other modules in order to fit the rebuilt firmware into 1MB flash. Finding modules to remove requires some trial/error and depends on what use cases you need the vehicle to meet.
Changing a Parameter
To change the value of a parameter click on the parameter row in a group or search list. This will open a side dialog in which you can update the value (this dialog also provides additional detailed information about the parameter - including whether a reboot is required for the change to take effect).
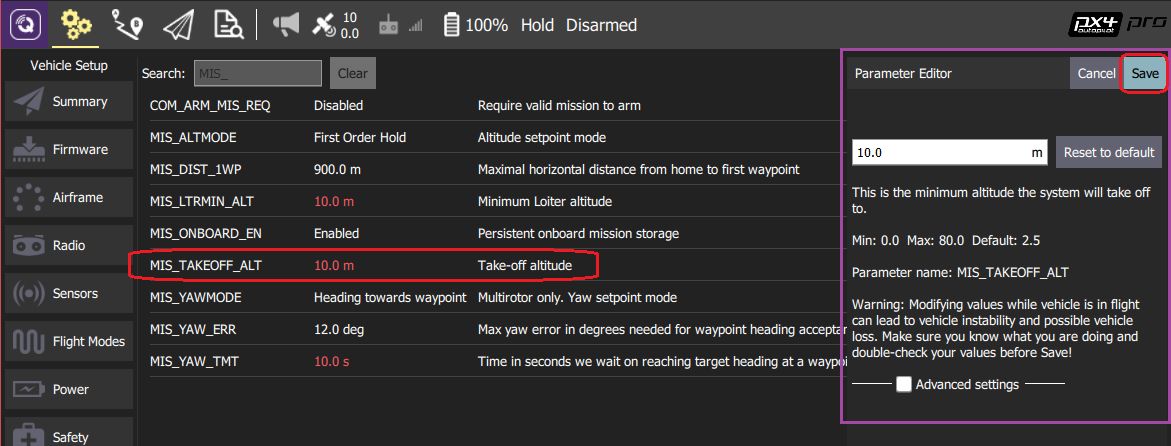
When you click Save the parameter is automatically and silently uploaded to the connected vehicle. Depending on the parameter, you may then need to reboot the flight controller for the change to take effect.
Tools
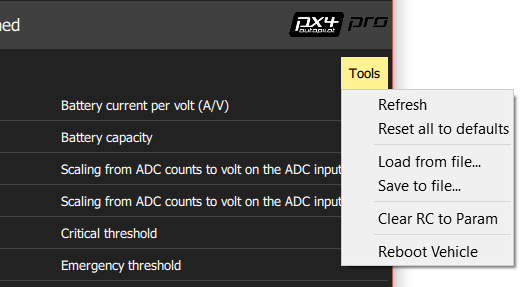
You can select additional options from the Tools menu on the top right hand side of the screen.
Refresh
Refresh the parameter values by re-requesting all of them from the vehicle.
Reset all to defaults
Reset all parameters to their original default values.
Load from file / Save to file
Load parameters from an existing file or save your current parameter settings to a file.
Clear RC to Param
This clears all associations between RC transmitter controls and parameters. For more information see: Radio Setup > Param Tuning Channels.
Reboot Vehicle
Reboot the vehicle (required after changing some parameters).