Camera Trigger
The camera trigger driver allows the use of the AUX ports to send out pulses in order to trigger a camera. This can be used for multiple applications including timestamping photos for aerial surveying and reconstruction, synchronising a multi-camera system or visual-inertial navigation.
In addition to a pulse being sent out, a MAVLink message is published containing a sequence number (thus the current session's image sequence number) and the corresponding timestamp.
Trigger Configuration
Camera triggering is usually configured from the QGroundControl Vehicle Setup > Camera section.
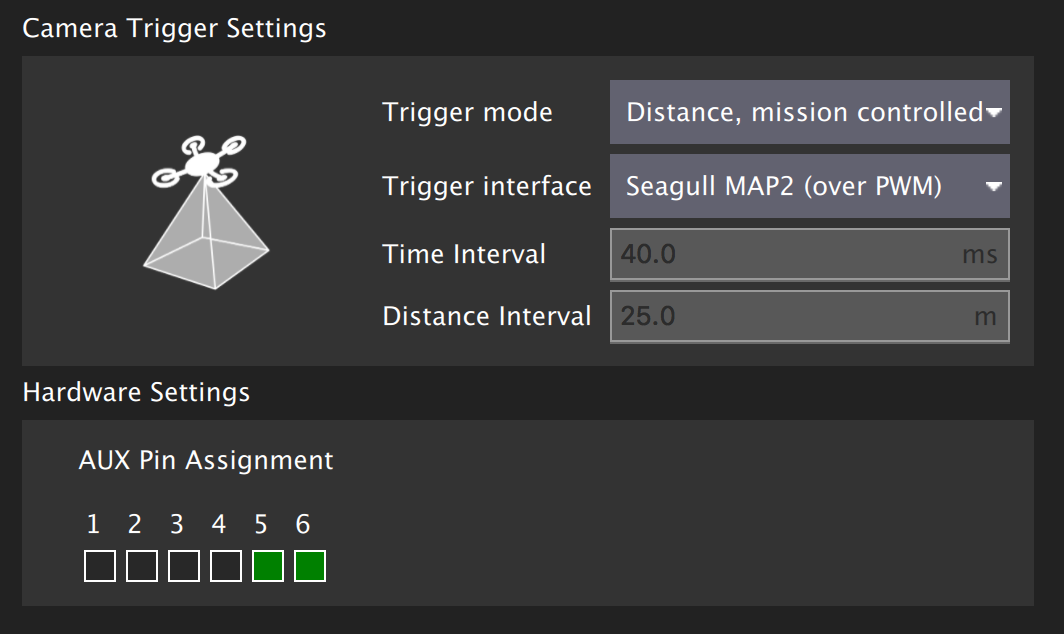
The different trigger modes, backend interfaces and hardware setup are described below (these can also be set directly from parameters).
The camera settings section is not available by default for FMUv2-based flight controllers (e.g. 3DR Pixhawk) because the camera module is not automatically included in firmware. For more information see Finding/Updating Parameters > Parameters Not In Firmware.
Trigger Modes
Four different modes are supported, controlled by the TRIG_MODE parameter:
| Mode | 描述 |
|---|---|
| 0 | Camera triggering is disabled. |
| 1 | Works like a basic intervalometer that can be enabled and disabled by using the MAVLink command MAV_CMD_DO_TRIGGER_CONTROL. See command interface for more details. |
| 2 | Switches the intervalometer constantly on. |
| 3 | Triggers based on distance. A shot is taken every time the set horizontal distance is exceeded. The minimum time interval between two shots is however limited by the set triggering interval. |
| 4 | triggers automatically when flying a survey in Mission mode. |
If it is your first time enabling the camera trigger app, remember to reboot after changing the
TRIG_MODEparameter.
Trigger Hardware Configuration
You can choose which pins to use for triggering using the TRIG_PINS parameter. The default is 56, which means that trigger is enabled on FMU pins 5 and 6.
On a Pixhawk flight controller that has both FMU and I/O boards these FMU pins map to
AUX5andAUX6(e.g. Pixhawk 4, CUAV v5+). On a controller that only has an FMU, the pins map toMAIN5andMAIN6(e.g. Pixhawk 4 mini, CUAV v5 nano). At time of writing triggering only works on FMU pins - you can't trigger a camera using pins on the I/O board.
With
TRIG_PINSset to its default value of 56, you can use the AUX pins 1, 2, 3 and 4 as actuator outputs (for servos/ESCs). Due to the way the hardware timers are handled (1234 and 56 are 2 different groups handled by 2 timers), this is the ONLY combination which allows the simultaneous usage of camera trigger and FMU actuator outputs. DO NOT CHANGE THE DEFAULT VALUE OFTRIG_PINSIF YOU NEED ACTUATOR OUTPUTS.
Trigger Interface Backends
The camera trigger driver supports several backends - each for a specific application, controlled by the TRIG_INTERFACE parameter:
| Number | 描述 |
|---|---|
| 1 | enables the GPIO interface. The AUX outputs are pulsed high or low (depending on the TRIG_POLARITY parameter) every TRIG_INTERVAL duration. This can be used to trigger most standard machine vision cameras directly. Note that on PX4FMU series hardware (Pixhawk, Pixracer, etc.), the signal level on the AUX pins is 3.3v. |
| 2 | Enables the Seagull MAP2 interface. This allows the use of the Seagull MAP2 to interface to a multitude of supported cameras. Pin 1 of the MAP2 should be connected to the lower AUX pin of TRIG_PINS (therefore, pin 1 to AUX 5 and pin 2 to AUX 6 by default). In this mode, PX4 also supports automatic power control and keep-alive functionalities of Sony Multiport cameras like the QX-1. |
| 3 | Enables the MAVLink interface. In this mode, no actual hardware output is used. Only the CAMERA_TRIGGER MAVLink message is sent by the autopilot (by default, if the MAVLink application is in onboard mode. Otherwise, a custom stream will need to be enabled). |
| 4 | Enables the generic PWM interface. This allows the use of infrared triggers or servos to trigger your camera. |
Other Parameters
| 参数 | 参数描述 |
|---|---|
| TRIG_POLARITY | Relevant only while using the GPIO interface. Sets the polarity of the trigger pin. Active high means that the pin is pulled low normally and pulled high on a trigger event. Active low is vice-versa. |
| TRIG_INTERVAL | Defines the time between two consecutive trigger events in milliseconds. |
| TRIG_ACT_TIME | Defines the time in milliseconds the trigger pin is held in the "active" state before returning to neutral. In PWM modes, the minimum is limited to 40 ms to make sure we always fit an activate pulse into the 50Hz PWM signal. |
The full list of parameters pertaining to the camera trigger module can be found on the parameter reference page.
Command Interface
TODO : NEEDS UPDATING updating
The camera trigger driver supports several commands:
MAV_CMD_DO_TRIGGER_CONTROL - Accepted in "command controlled" mode (TRIG_MODE 1).
| Command Parameter | 参数描述 |
|---|---|
| Param #1 | Trigger enable/disable (set to 0 for disable, 1 for start) |
| Param #2 | Trigger cycle time in milliseconds (sets the TRIG_INTERVAL parameter.) |
| Param #3 | Sequence reset (set to 1 to reset image sequence number, 0 to keep current sequence number) |
MAV_CMD_DO_DIGICAM_CONTROL - Accepted in all modes. This is used by the GCS to test-shoot the camera from the user interface. The trigger driver does not yet support all camera control parameters defined by the MAVLink spec.
| Command Parameter | 参数描述 |
|---|---|
| Param #5 | Trigger one-shot command (set to 1 to trigger a single image frame). |
MAV_CMD_DO_SET_CAM_TRIGG_DIST - Accepted in "mission controlled" mode (TRIG_MODE 4)
This command is autogenerated during missions to trigger the camera based on survey missions from the GCS.
Testing Trigger Functionality
- On the PX4 console:
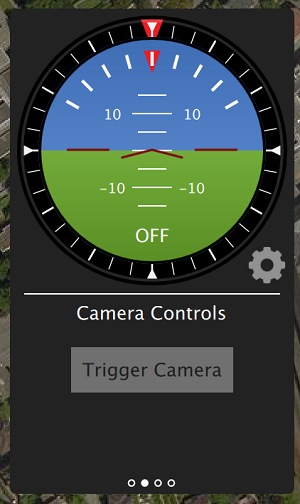
camera_trigger test From QGroundControl:
Click on Trigger Camera in the main instrument panel. These shots are not logged or counted for geotagging.
Sony QX-1 example (Photogrammetry)

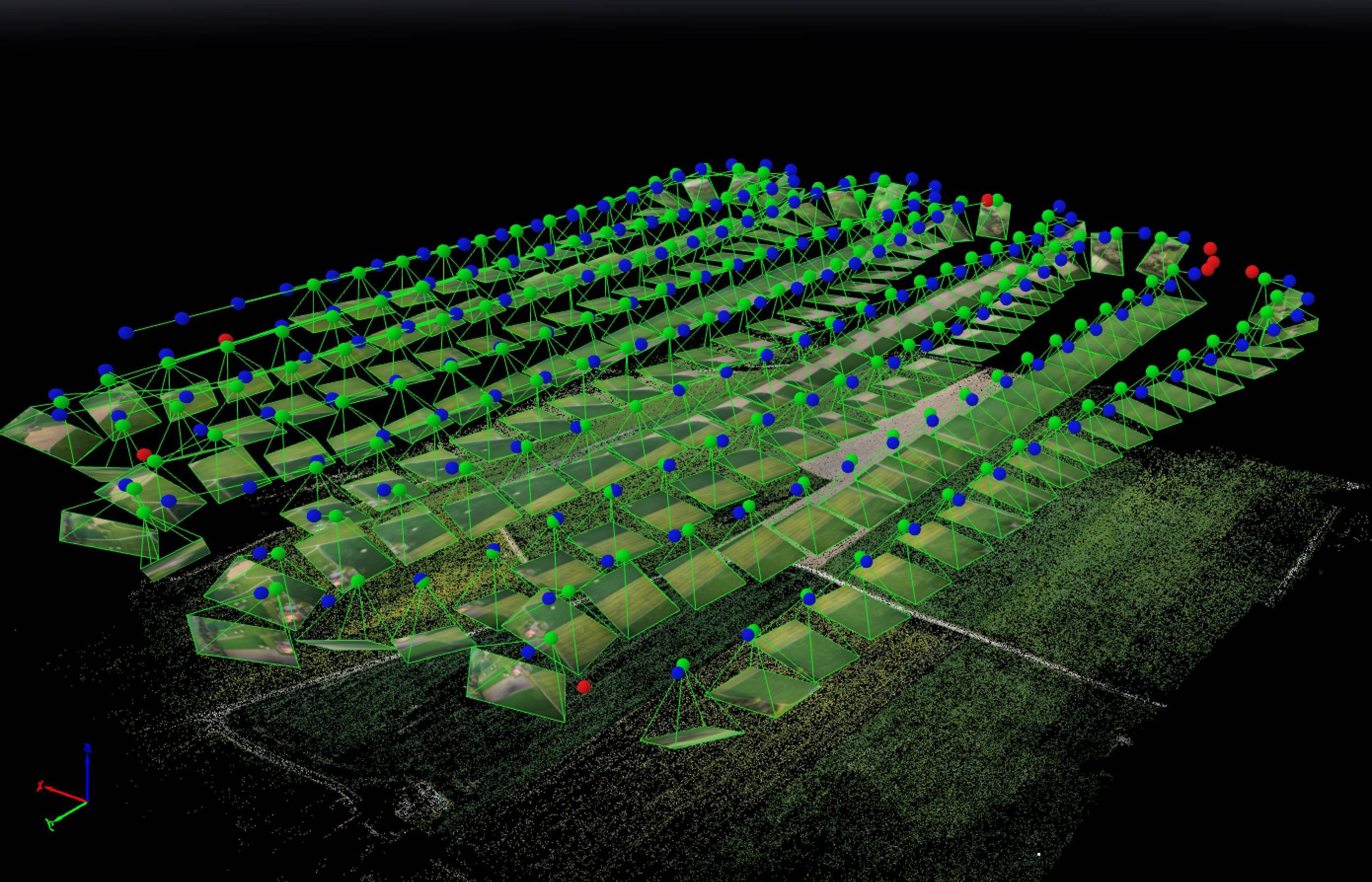
In this example, we will use a Seagull MAP2 trigger cable to interface to a Sony QX-1 and use the setup to create orthomosaics after flying a fully autonomous survey mission.
Trigger Settings
The recommended camera settings are:
TRIG_INTERFAC=2(Seagull MAP2).TRIG_MODE=4(Mission controlled).- Leave the remaining parameters at their defaults.
You will need to connect the Seagull MAP2 to the auxiliary/FMU pins on your autopilot. Pin 1 goes to AUX 5, and Pin 2 to AUX 6. The other end of the MAP2 cable will go into the QX-1's "MULTI" port.
Camera Configuration
We use a Sony QX-1 with a 16-50mm f3.5-5.6 lens for this example.
To avoid autofocus and metering lag when the camera is triggered, the following guidelines should be followed:
- Manual focus to infinity
- Set camera to continuous shooting mode
- Manually set exposure and aperture
- ISO should be set as low as possible
- Manual white balance suitable for scene
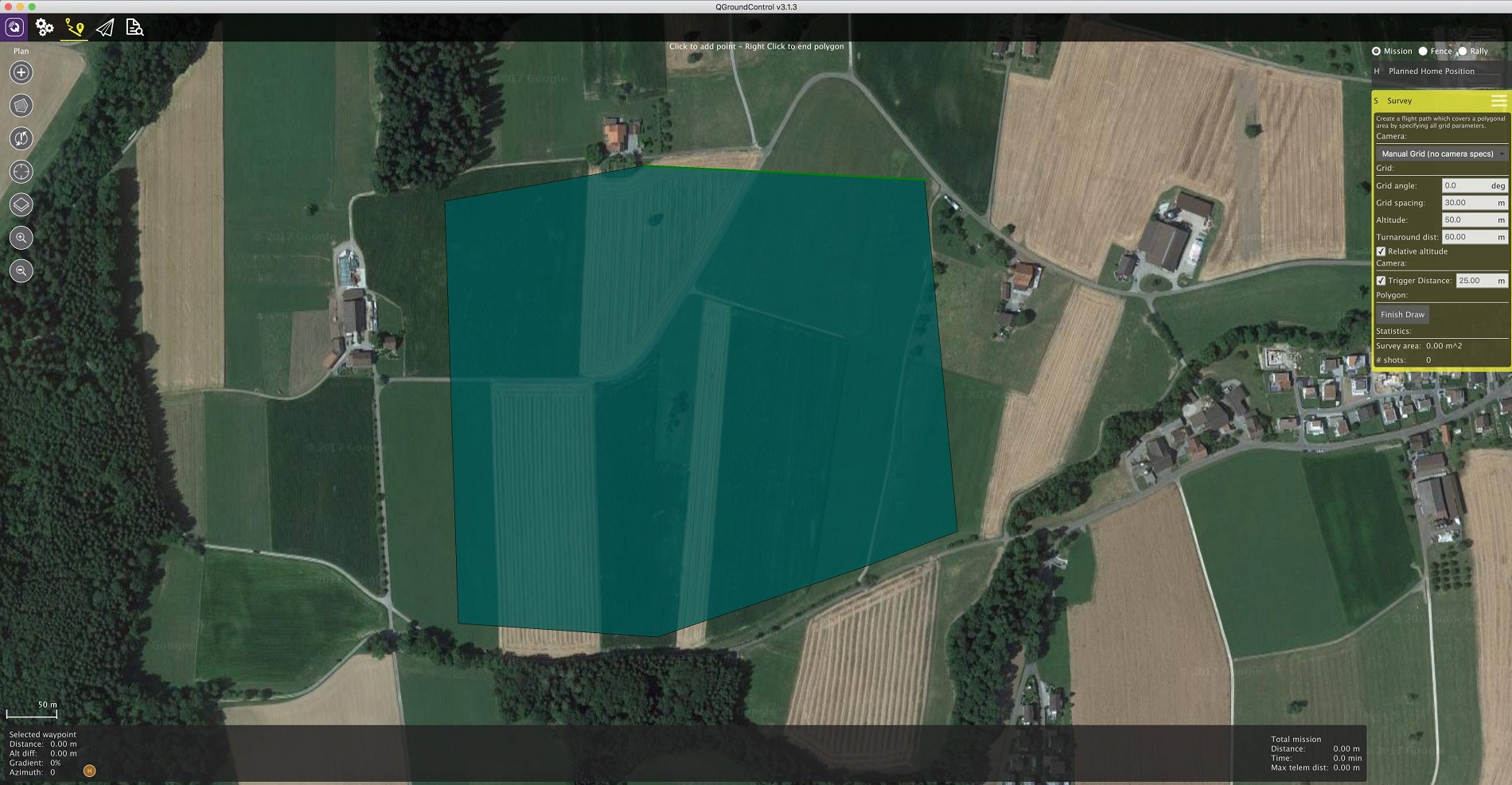
Mission Planning

Geotagging
Download/copy the logfile and images from the flight and point QGroundControl to them. Then click on "Start Tagging".
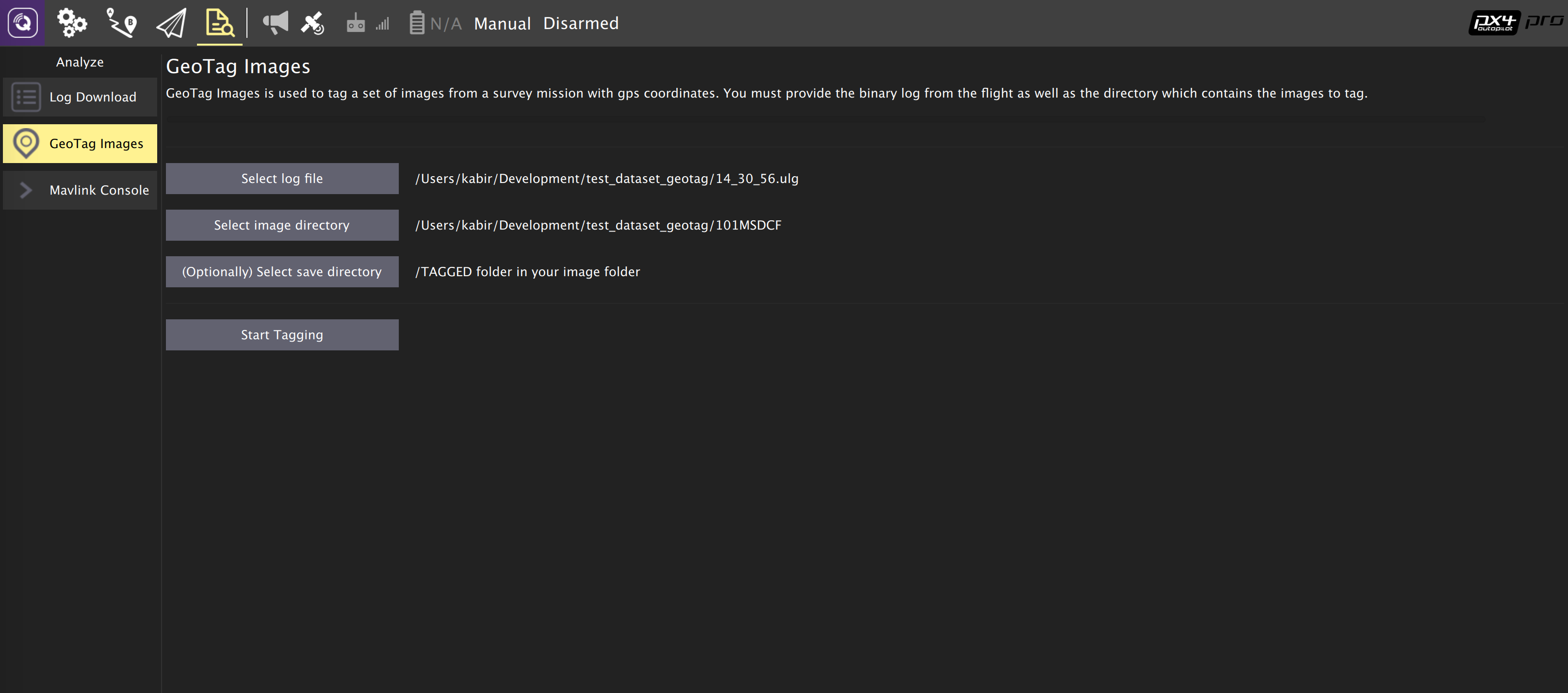
You can verify the geotagging using a free online service like Pic2Map. Note that Pic2Map is limited to only 40 images.
Reconstruction
We use Pix4D for 3D reconstruction.
Camera-IMU sync example (VIO)
In this example, we will go over the basics of synchronising IMU measurements with visual data to build a stereo Visual-Inertial Navigation System (VINS). To be clear, the idea here isn't to take an IMU measurement exactly at the same time as we take a picture but rather to correctly time stamp our images so as to provide accurate data to our VIO algorithm.
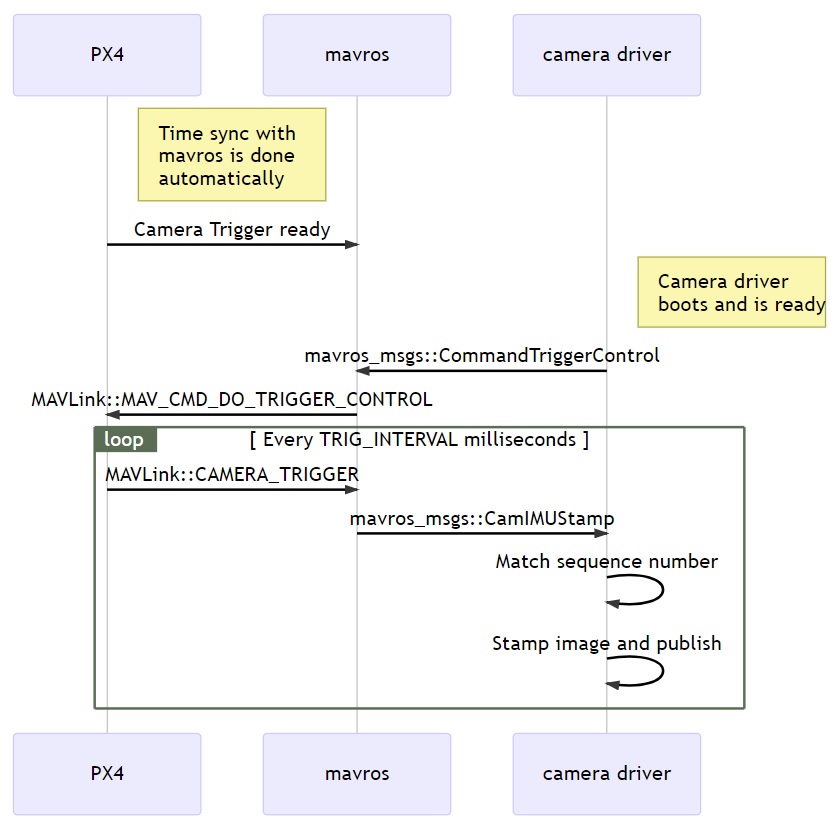
The autopilot and companion have different clock bases (boot-time for the autopilot and UNIX epoch for companion), so instead of skewing either clock, we directly observe the time offset between the clocks. This offset is added or subtracted from the timestamps in the MAVLink messages (e.g HIGHRES_IMU) in the cross-middleware translator component (e.g MAVROS on the companion and mavlink_receiver in PX4). The actual synchronisation algorithm is a modified version of the Network Time Protocol (NTP) algorithm and uses an exponential moving average to smooth the tracked time offset. This synchronisation is done automatically if MAVROS is used with a high-bandwidth onboard link (MAVLink mode onboard).
For acquiring synchronised image frames and inertial measurements, we connect the trigger inputs of the two cameras to a GPIO pin on the autopilot. The timestamp of the inertial measurement from start of exposure and a image sequence number is recorded and sent to the companion computer (CAMERA_TRIGGER message), which buffers these packets and the image frames acquired from the camera. They are matched based on the sequence number (first image frame is sequence 0), the images timestamped (with the timestamp from the CAMERA_TRIGGER message) and then published.
The following diagram illustrates the sequence of events which must happen in order to correctly timestamp our images.
Step 1
First, set the TRIG_MODE to 1 to make the driver wait for the start command and reboot your FCU to obtain the remaining parameters.
Step 2
For the purposes of this example we will be configuring the trigger to operate in conjunction with a Point Grey Firefly MV camera running at 30 FPS.
TRIG_INTERVAL: 33.33 msTRIG_POLARITY: 0 (active low)TRIG_ACT_TIME: 0.5 ms. The manual specifies it only has to be a minimum of 1 microsecond.TRIG_MODE: 1, because we want our camera driver to be ready to receive images before starting to trigger. This is essential to properly process sequence numbers.TRIG_PINS: 56, Leave default.
Step 3
Wire up your cameras to your AUX port by connecting the ground and signal pins to the appropriate place.
Step 4
You will have to modify your driver to follow the sequence diagram above. Public reference implementations for IDS Imaging UEye cameras and for IEEE1394 compliant cameras are available.