RTK GPS
实时差分可以将 GNSS/GPS 的精度提高到厘米级。 装备 RTK 后可以将 PX4 应用到需要精确定位的精确测绘中。
你需要:
- 一对RTK GPS 设备(地面站和移动站)
- 一台装有 QGroundControl 的 PC 或笔记本(Android/iOS 的 QGroundControl 地面站不支持 RTK)
- 一架连接有 WiFi 或数传的飞机
QGroundControl*理论上可以在多台飞机启用 RTK GPS(每台设备上都安装一个移动站)。 在编写本文时, 此用发还未进行测试。
支持的 RTK 设备
PX4 supports the u-blox M8P, u-blox F9P and the Trimble MB-Two GPS and products that incorporate it. 下面的 RTK 设备已经经过测试。
- CUAV C-RTK GPS
- Drotek XL RTK GPS
- Here+ RTK GPS
- Trimble MB-Two
- Freefly RTK GPS (F9P)
- SparkFun GPS-RTK2 Board - ZED-F9P (www.sparkfun.com)
- SIRIUS RTK GNSS ROVER (F9P) (store-drotek.com)
有一些 RTK 模块只能作为基站或移动站,有的则可以两用。
硬件安装
RTK 移动站(飞机)
连接飞机上的移动站到飞控的 GPS 端口上(其他的 GPS模块同理)。
实际的接线可能因飞控和 RTK 而有所差异(详情参看所选设备的说明书)。
RTK 基站(地面端)
使用 USB 连接基站到QGroundControl。 基站在使用中必须保持不动。
选择一个不会移动的地方,上方开阔,最好避开建筑物。 使用三脚架或安装在屋顶,效果更好。
电台/WiFi
飞机和地面站之间必须使用 wifi 或电台连接。
链接必须使用 MAVLink2 协议,因为 MAVLink2 能更好的利用通道。 这个设置默认即可,如果不是默认数据,可以参考下面的MAVLink2 设置介绍。
RTK 连接步骤
RTK GPS 是即插即用的。
- 打开QGroundControl,使用 USB 连接基站的 RTK GPS 到地面站。 电脑会自动识别设备。
启动飞机,确保飞机连接上QGroundControl地面站。
当 RTK GPS 设备连接上,在上面工具栏的正常显示GPS的位置,会显示 RTK GPS 的状态。 当 RTK 正在被设置,会显示为红色,RTK GPS 激活后会变为白色。 点击图标,可以查看当前状态和 RTK 的精度。
然后 QGroundControl 开始设置 RTK (称为 "测量")。
测量是一个获得基站准确位置的设置过程。 这个过程通常会需要几分钟(在达到RTK 设置中指定的最小时间和精度后结束)。
你也可以点击 RTK状态按钮查看。

测量完成:
RTK GPS 图标变为白色,QGroundControl开始传送位置数据到飞机。

飞机的 GPS 切换到 RTK 模式。 新的模式会显示在普通GPS 状态按钮的位置(
3D RTK GPS 锁定):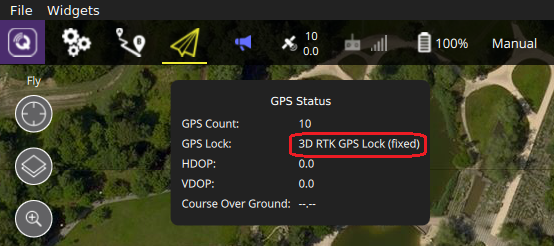
PX4 可用的设置
下面的设置可能需要设置。(使用QGroundControl)。
RTK GPS 设置
The RTK GPS settings are specified in the QGroundControl General Settings (SettingsView > General Settings > RTK GPS).
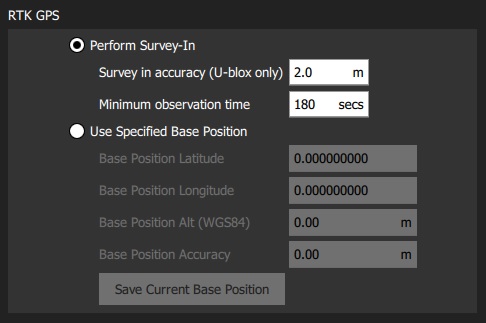
这些设置定义了 RTK GPS 设置过程(称为“测量”)完成的最小持续时间和最小精度。
You can save and reuse a base position in order to save time: perform Survey-In once, select Use Specified Base Position and press Save Current Base Position to copy in the values for the last survey. The values will then persist across QGC reboots until they are changed.
MAVLink2
The MAVLink2 protocol must be used because it makes more efficient use of lower-bandwidth channels. This should be enabled by default on recent builds.
To ensure MAVLink2 is used:
将遥测模块固件更新到最新版本 (请参阅 QGroundControl> 设置 > 固件 </a0 >)。</li>
将 MAV_PROTO_VER 设置为 2 (请参阅 < 1>QGroundControl 设置 > 参数 </1 >)</ul>
调试
You may also need to tune some parameters as the default parameters are tuned assuming a GPS accuracy in the order of meters, not centimeters. For example, you can decrease EKF2_GPS_V_NOISE and EKF2_GPS_P_NOISE to 0.2.
Use RTK GPS for Yaw
Some RTK GPS units (i.e. with multiple antennas) can output a yaw angle, which can be used instead of the heading from the magnetic compass. To enable this, set bit position 7 in EKF2_AID_MASK to 1 (add 128 to the parameter value).
Dual Receivers
A second GPS receiver can be used as a backup (either RTK or non RTK). See the EKF2 GPS Configuration section.
<!--
Video demonstration would be nice.
something that shows positioning of base, connection of RTK rover, survey in process. Some sort of short precision survey. -->
飞机设置示例
The airframe build topic DJI Flamewheel 450 with distance sensor and RTK GPS describes an airframe setup with the Here+ RTK GPS and a Pixhawk 3 Pro.