大疆Matrice 100 (Pixhawk 1)
The DJI® Matrice quadcopter is a fully customizable and programmable flight platform. This build log provides build and configuration instructions for using the frame with the 3DR Pixhawk flight controller.
Key information:
- Frame: DJI Matrice 100
- Flight controller: Pixhawk 1

Parts List
* [DJI Matrice 100](http://store.dji.com/product/matrice-100) Just ESCs motors, and frame.
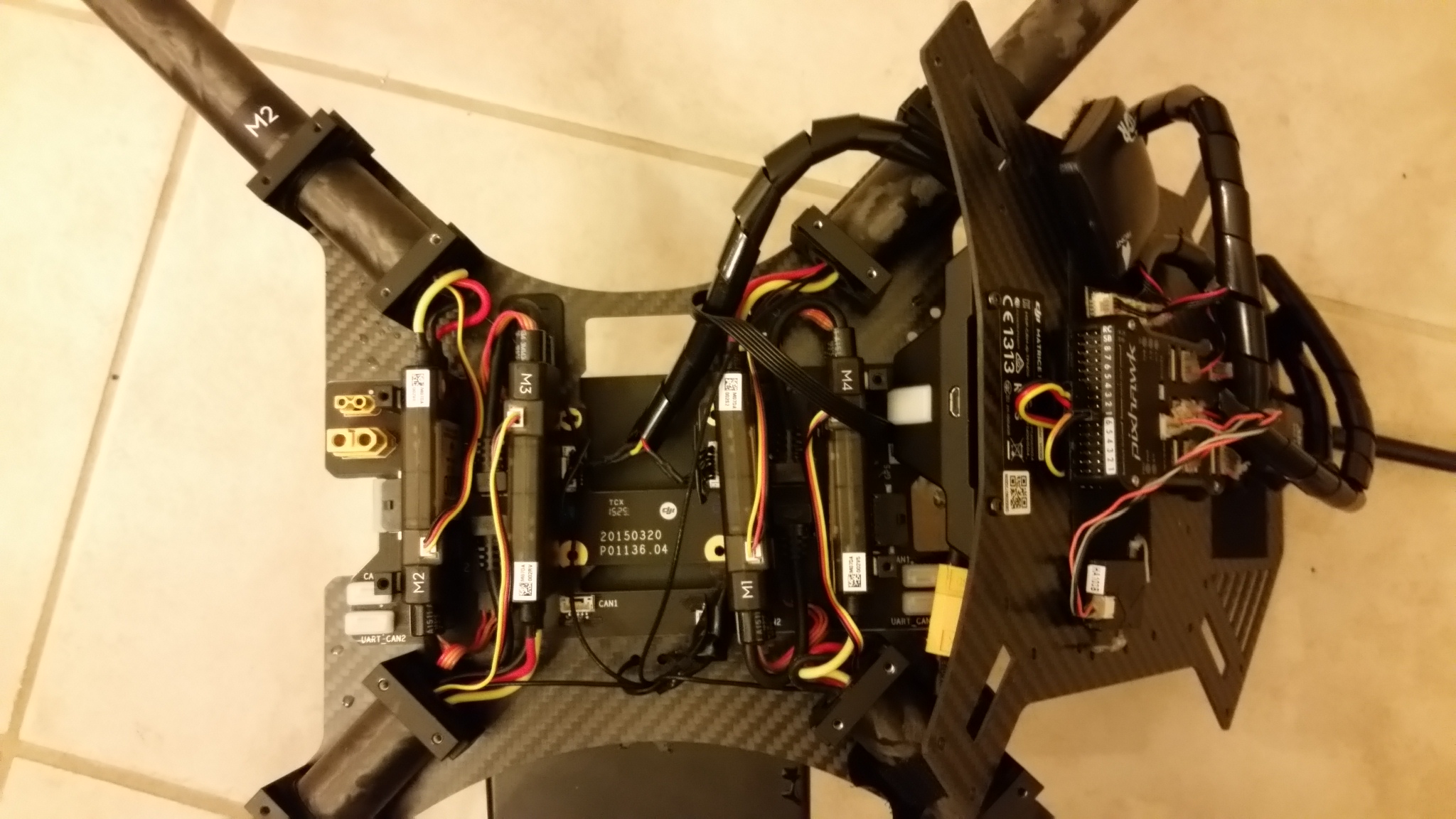
Motor Connections
See the Pixhawk Wiring Quickstart for autopilot assembly instructions.
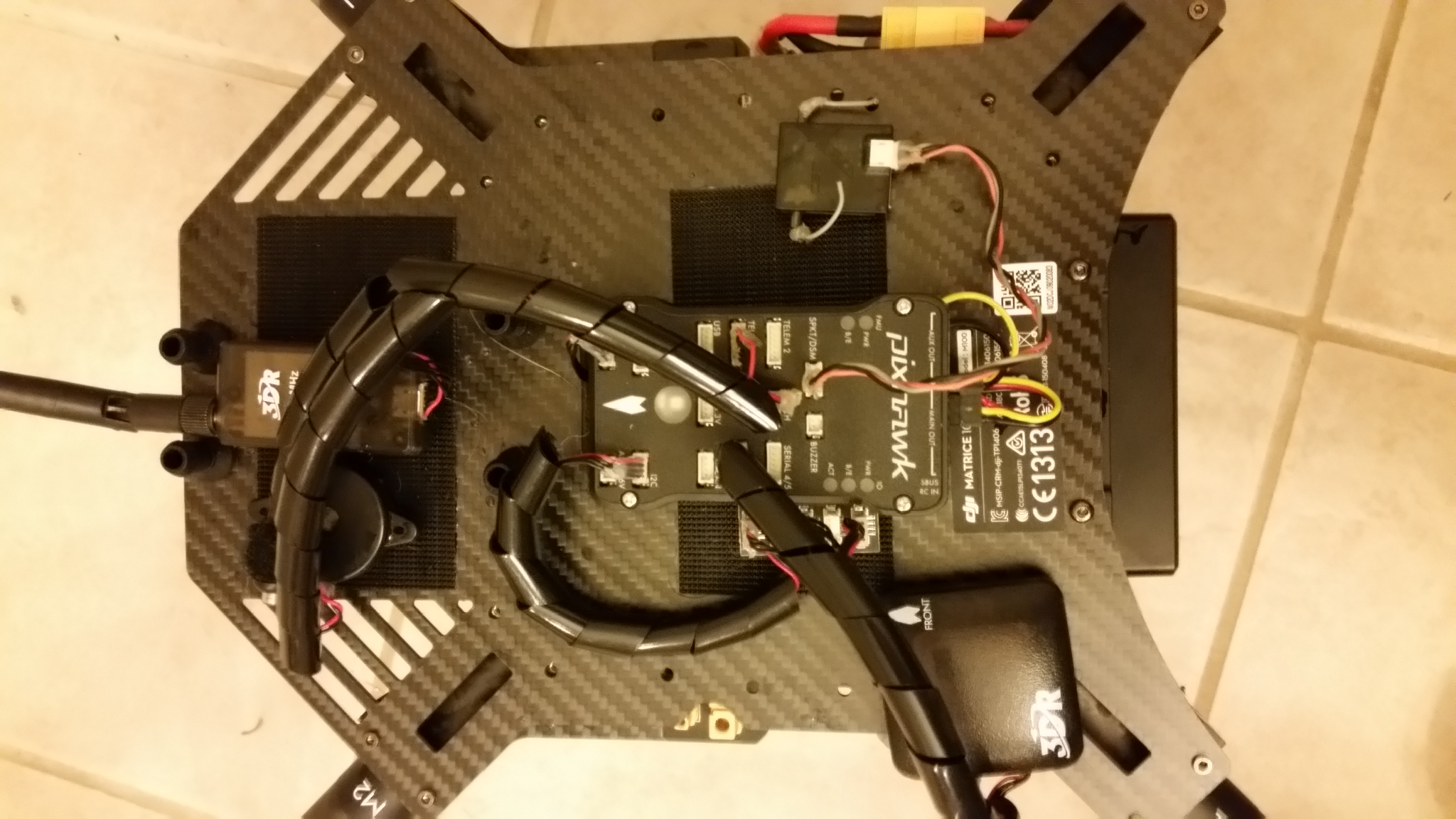
Wiring Diagram

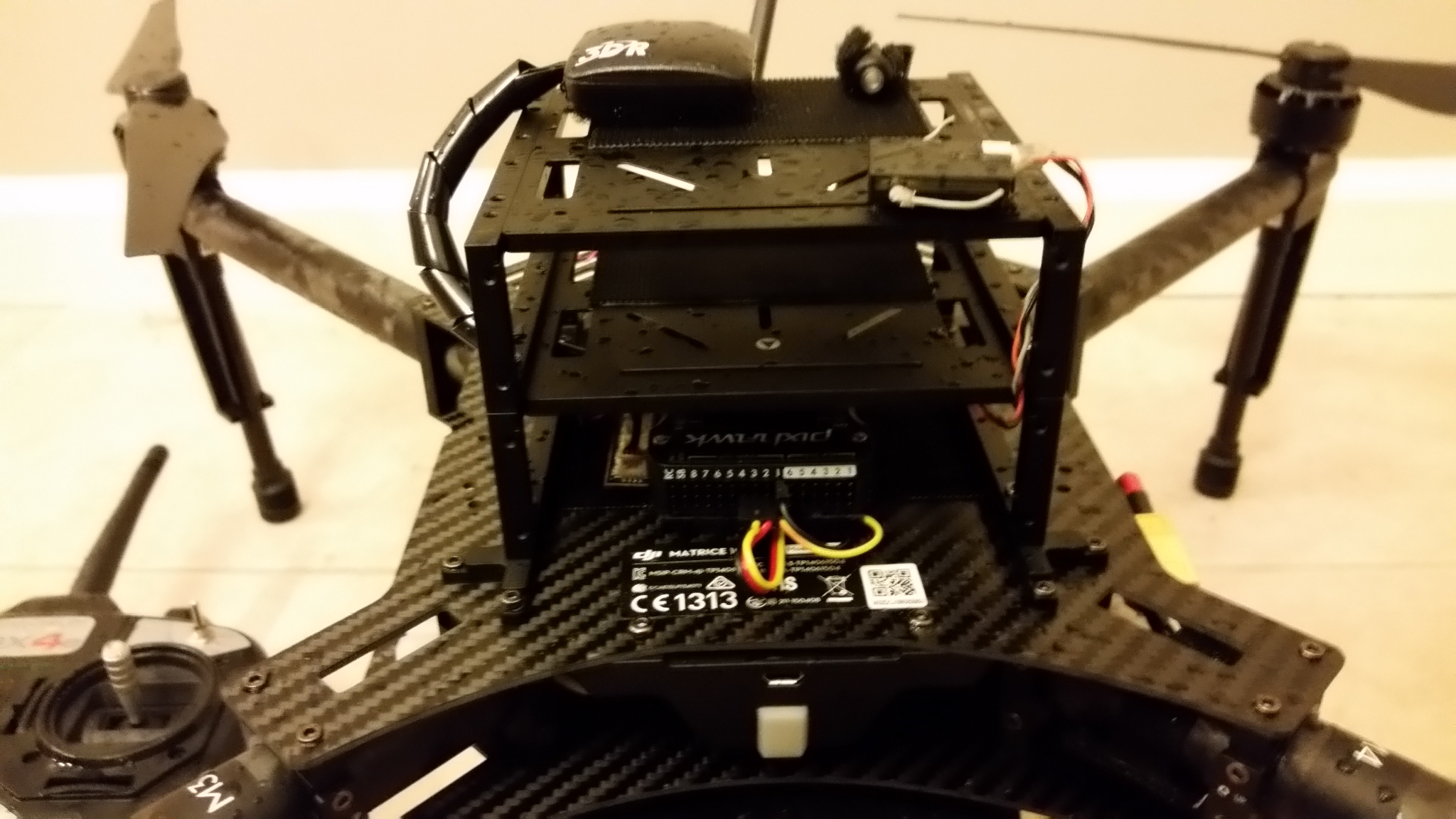
Wiring Harness

PWM Connections

Other views

Autopilot Outputs
| Output | Rate | Actuator |
|---|---|---|
| MAIN1 | 400 Hz | Front right, CCW |
| MAIN2 | 400 Hz | Back left, CCW |
| MAIN3 | 400 Hz | Front left, CW |
| MAIN4 | 400 Hz | Back right, CW |
| AUX1 | 50 Hz | RC AUX1 |
| AUX2 | 50 Hz | RC AUX2 |
| AUX3 | 50 Hz | RC AUX3 |
参数
- At high throttle the inner loop causes oscillations with default x quad gains. At low throttle, higher gains give a better response, this suggests that some gain scheduling based on the throttle may improve the overall response and this could be implemented in mc_att_control. For now we will just tune it so that there are no oscillations at low or high throttle, and take the bandwidth hit at low throttle.
- MC_PITCHRATE_P: 0.05
- MC_PITCHRATE_D: 0.001
- The battery has 6 cells instead of the default 3
- BAT_N_CELLS: 6