飞行 101
该主题介绍了用遥控器以手动或者自动-辅助飞行模式(自主飞行请参阅:任务)来控制飞行器的基本飞行。
在你首飞之前应该阅读我们的首飞指南
Arm the Vehicle
Before you can fly the vehicle it must first be armed. This will power all motors and actuators; on a multicopter it will start propellers turning.
To arm the drone:
- First disengage the safety switch.
- Use the arm command for your vehicle - put the throttle stick in the bottom right corner.
- Alternatively configure an arm/disarm switch.
- You can also arm in QGroundControl (PX4 does not require a radio control for flying autonomously).
The vehicle will not arm until it is calibrated/configured and has a position lock. Vehicle Status Notifications (including on-vehicle LEDs, audio notifications and QGroundControl updates) can tell you when the vehicle is ready to fly (and help you work out the cause when it is not ready to fly).
The vehicle will (by default) automatically disarm (turn off motors) if you take too long to take off! This is a safety measure to ensure that vehicles return to a safe state when not in use.
Takeoff
The easiest way to takeoff (after arming the vehicle) is to use the automatic Takeoff mode. Usually this is triggered from an RC switch or ground station.
Multicopter (and VTOL in multicopter mode) pilots can take off manually by enabling position mode, arming the vehicle, and then raising the throttle stick above 62.5%. Above this value all controllers are enabled and the vehicle goes to the throttle level required for hovering (MPC_THR_HOVER).
The automatic takeoff mode is highly recommended, in particular for Fixed Wing vehicles!
The vehicle may disarm if you take too long to take off after arming (tune the timeout using COM_DISARM_PRFLT).
The Failure Detector will automatically stop the engines if there is a problem on takeoff.
Landing
The easiest way to land is to use the automatic Land or Return modes.
For multicopter (and VTOL in multicopter mode) pilots can land manually by pressing the throttle stick down until the vehicle lands and disarms.
Note that vehicles automatically disarm on landing by default:
- Use COM_DISARM_LAND to set the time to auto-disarm after landing (or disable it altogether).
- Manually disarm by putting the throttle stick in the bottom left corner.
If you see the vehicle "twitch" during landing (turn down the motors, and then immediately turn them back up) this is probably caused by a poor Land Detector Configuration (specifically, a poorly set MPC_THR_HOVER).
Automatic landing is highly recommended, in particular for Fixed Wing vehicles.
Flight Controls/Commands
All flying, including takeoff and landing, is controlled using the 4 basic commands: roll, yaw, pitch and throttle.
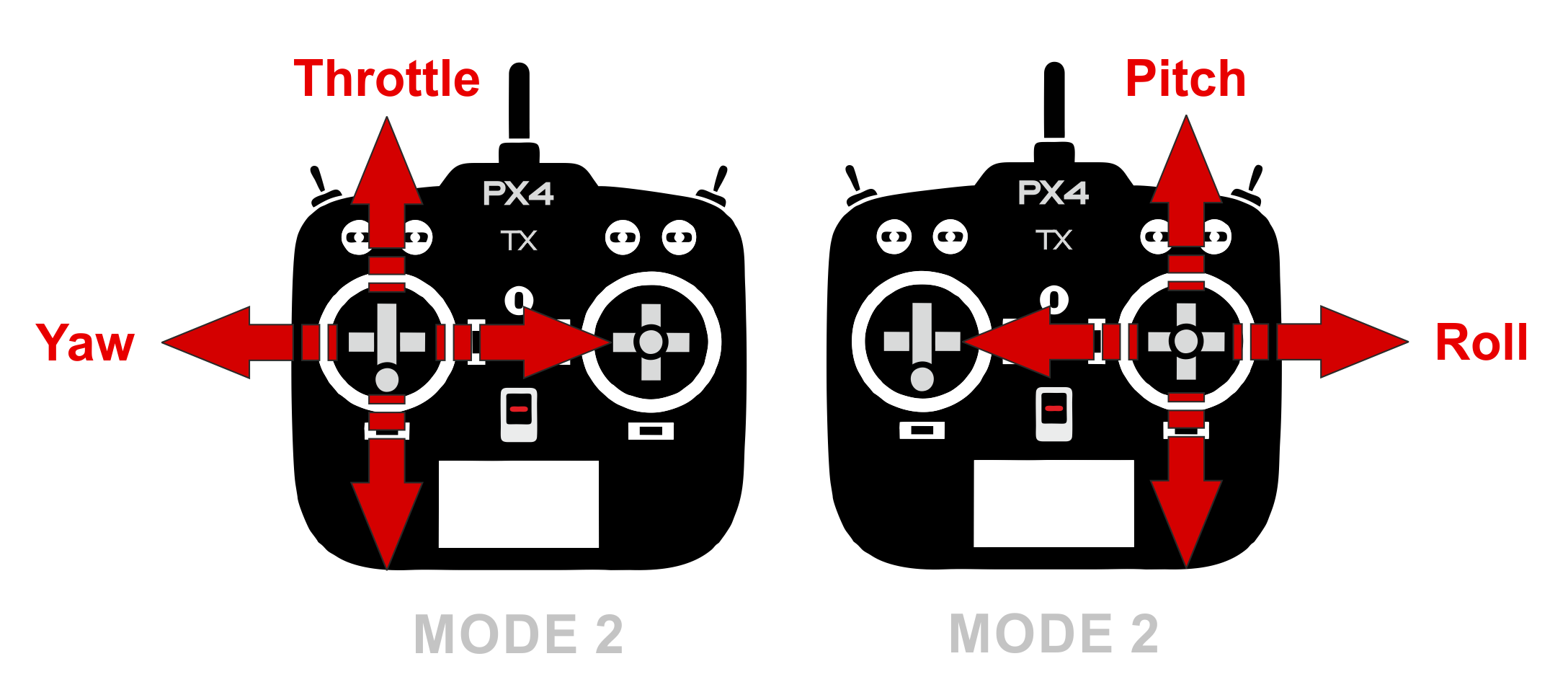
In order to control your aircraft you need to understand how the basic Roll, Pitch, Yaw and Throttle commands affect movement in 3D space. This differs depending on whether you're controlling a forward-flying aircraft like a plane, or a "hover aircraft" like a multicopter.
悬停飞机
Hover aircraft (Copter, VTOL in hover mode) respond to the movement commands as shown below:
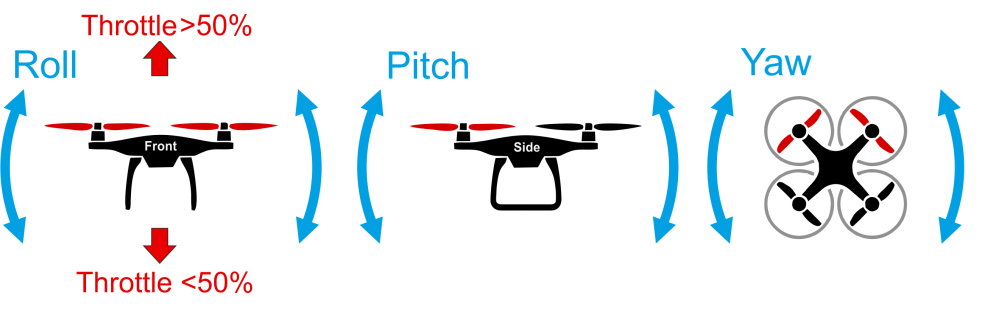
- Pitch => Forward/back.
- Roll => Left/right.
- Yaw => Left/right rotation around the centre of the frame.
- Throttle => Changed altitude/speed.
前飞飞机
Forward-flying aircraft (planes, VTOL in forward flight) respond to the movement commands as shown below:
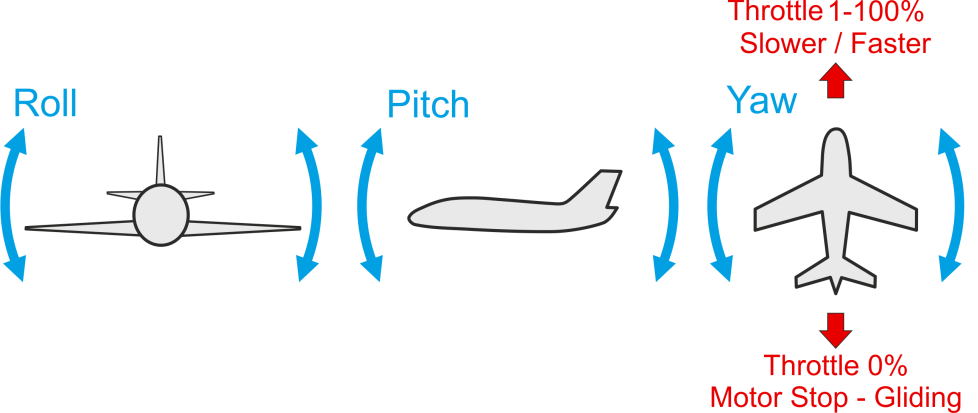
- Pitch => Up/down.
- Roll => Left/right and a turn.
- Yaw => Left/right tail rotation and turn.
- Throttle => Changed forward speed.
The best turn for airplanes is called a coordinated turn, and is performed using roll and little yaw at the same time. This maneuver requires experience!
Assisted Flight
Even with an understanding of how the vehicle is controlled, flight in fully manual mode can be quite unforgiving. New users should configure their transmitter to use flight modes where the autopilot automatically compensates for erratic user input or environmental factors.
The following three modes are highly recommended for new users:
- Stabilized - Vehicle hard to flip, and will level-out if the sticks are released (but not hold position)
- Altitude - Climb and drop are controlled to have a maximum rate.
- Position - When sticks are released the vehicle will stop (and hold position against wind drift)
You can also access automatic modes through the buttons on the bottom of the QGroundControl main flight screen.