CUAV v5 (Discontinued)
This flight controller has been discontinued and is no longer commercially available.
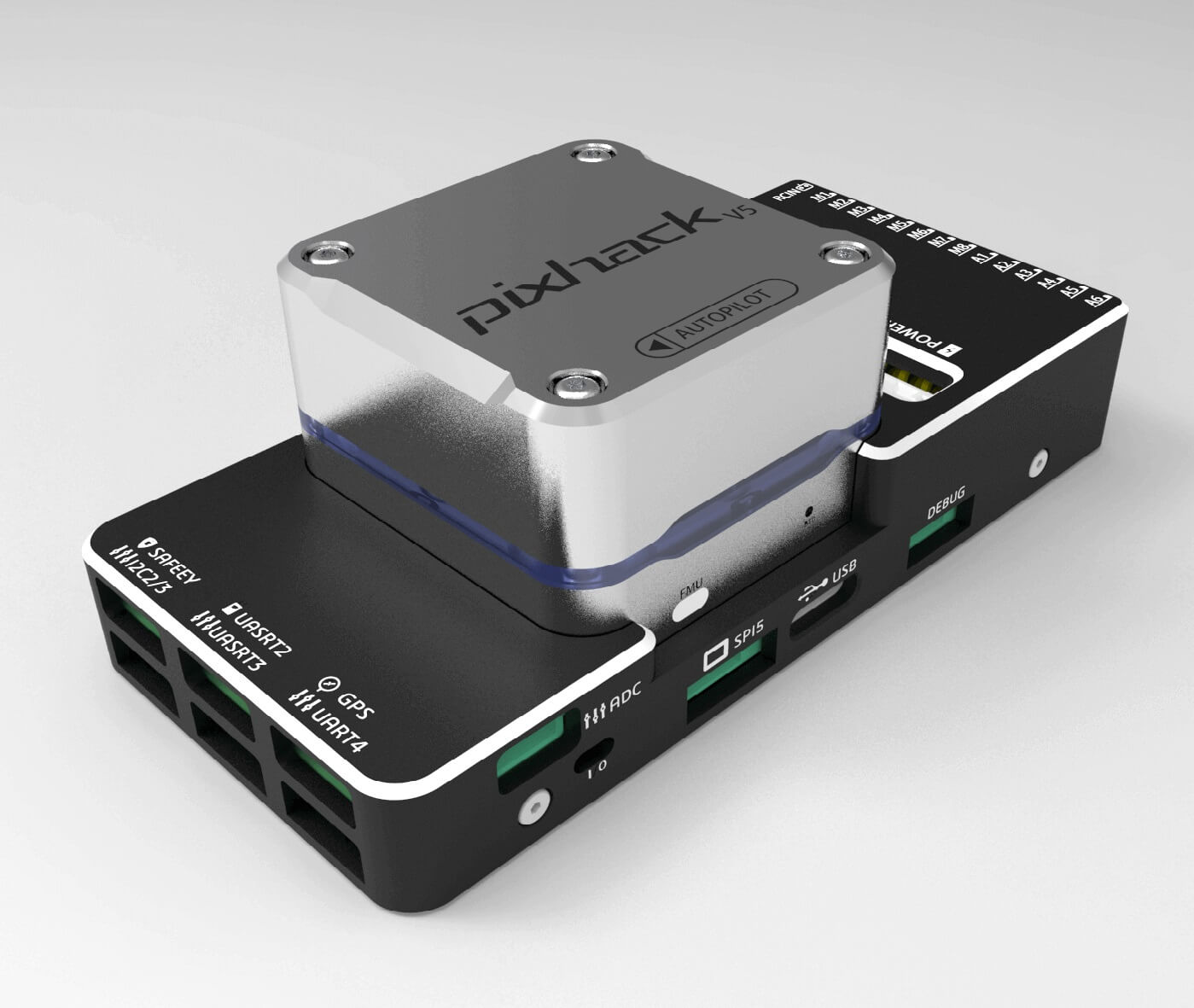
CUAV v5® (previously "Pixhack v5") is an advanced autopilot designed and made by CUAV®. 该控制器基于Pixhawk项目的FMUv5 开源硬件设计。 它在NuttX OS操作系统上运行PX4,并与PX4固件完全兼容。 它主要面向学术和商业开发者。
快速预览
- 主处理器:STM32F765
- 32 位 Arm® Cortex®-M7,216MHz,2MB 储存,512KB RAM
IO 处理器:STM32F100
- 32 位 Arm® Cortex®-M3,24MHz,8KB SRAM
内置传感器:
- 加速度计/陀螺仪:ICM-20689
- 加速度计/陀螺仪:BMI055
- 磁力计:IST8310
- 气压计:MS5611
接口:
- 14路PWM输出 (6路来自FMU, 8路来自 IO)
- FMU上有3个专用PWM/Capture输入
- CPPM专用的RC输入
- Dedicated R/C input for PPM and S.Bus
- 电平/PWM RSSI输入
- S.BUS伺服输出
- 5个通用串行口
- 4路I2C总线
- 4路SPI总线
- 2路CAN总线
- 2个电池电流/电压模拟输入口
- 电源系统:
- 输入电压:4.3~5.4V
- USB输入电压: 4.75~5.25V
- 伺服导轨输入电压:0~36V
- 重量和尺寸:
- 重量:99g
- 尺寸:448412mm
- 其它特性:
- 工作温度:-20 ~ 80°C (实测值)
采购
从 CUAV 官方淘宝店采购。
接口定义
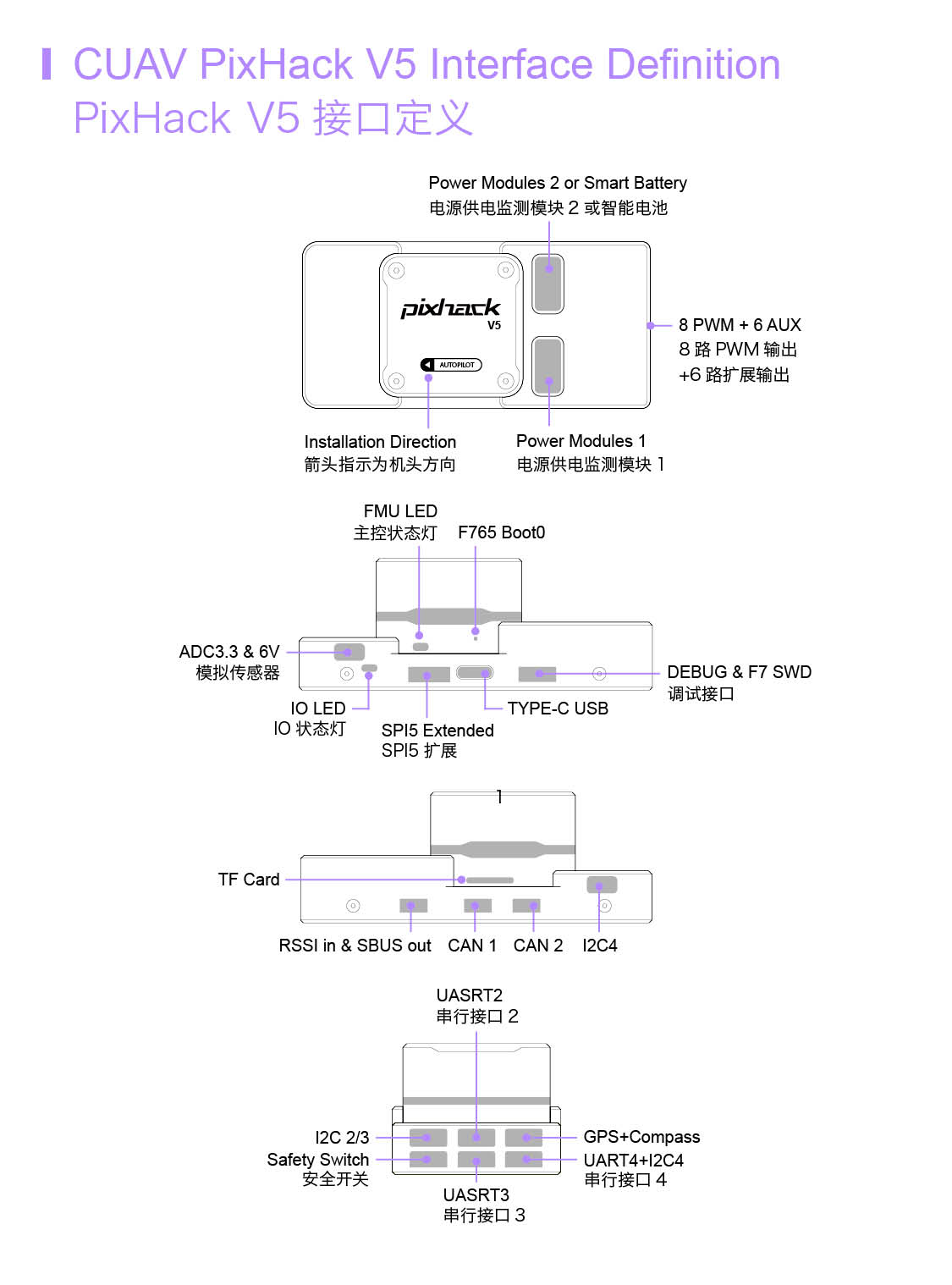
The RCIN interface is limited to powering the rc receiver and cannot be connected to any power/load.
额定电压
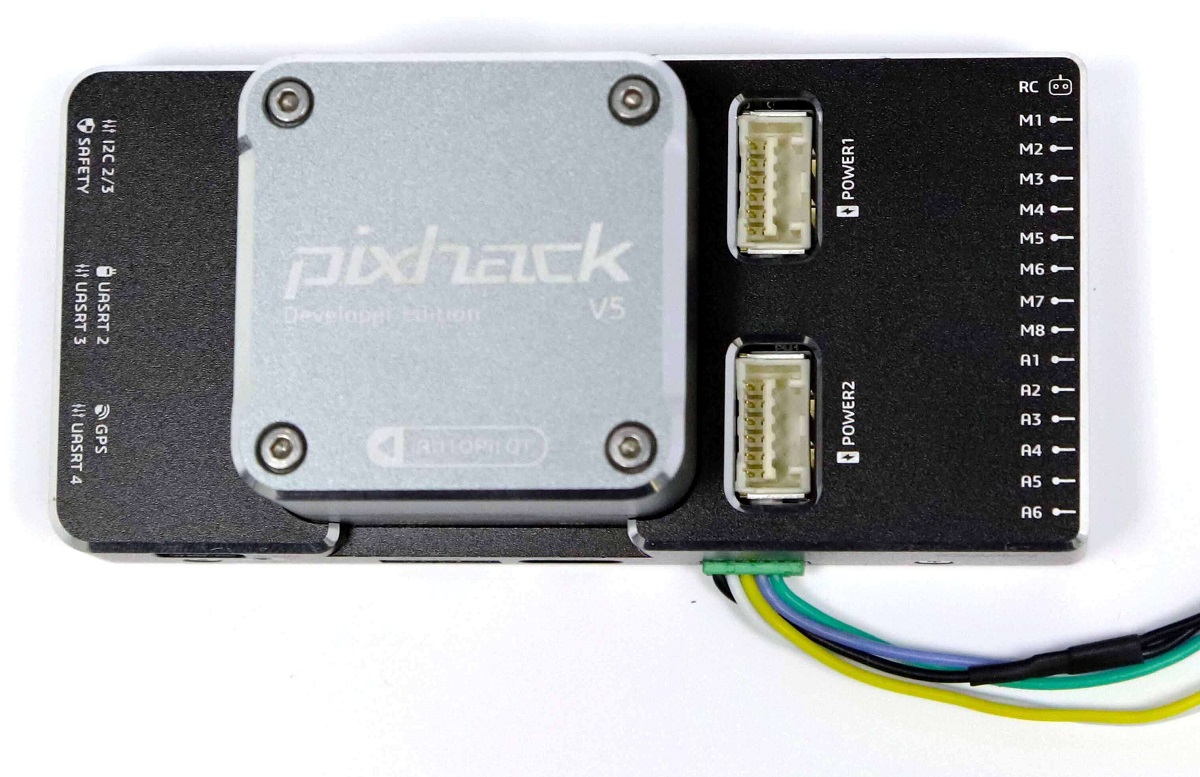
CUAV v5 can be triple-redundant on the power supply if three power sources are supplied. 三个电源口:POWER1, POWER2 and USB。
The output power rails FMU PWM OUT and I/O PWM OUT (0V to 36V) do not power the flight controller board (and are not powered by it). You must supply power to one of POWER1, POWER2 or USB or the board will be unpowered.
正常运行最大额定值
在这些条件下,所有电源将按此顺序用于为系统供电:
- POWER1 和 POWER2 输入电压 (4.3 v 至 5.4 v)
- USB 输入电压 (4.75 v 至 5.25 v)
编译固件
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make px4_fmu-v5_default
Debug调试端口
The PX4 System Console and SWD interface operate on the FMU Debug port. 只需将FTDI电缆连接到Debug & F7 SWD连接器。 To access the I/O Debug port, the user must remove the CUAV v5 shell. 这两个端口都有标准串行引脚, 可以连接到标准的FTDI电缆(3.3 v,但耐压5v )。
引脚排列如图所示
| 针脚 | CUAV v5 debug |
|---|---|
| 1 | GND |
| 2 | FMU-swclk |
| 3 | FMU-SWDIO |
| 4 | UART7_RX |
| 5 | UART7_TX |
| 6 | VCC |
Serial Port Mapping
| UART | Device | Port |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM1 (flow control) |
| USART3 | /dev/ttyS2 | TELEM2 (flow control) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | TX is RC input from SBUS_RC connector |
| UART7 | /dev/ttyS5 | Debug Console |
| UART8 | /dev/ttyS6 | PX4IO |
Peripherals
Supported Platforms / Airframes
任何可用普通RC伺服系统或Futaba S-Bus伺服系统控制的多旋翼、固定翼、无人机、无人船。 全部可支持的机型可见 机型参考。
Further info
FMUv5参考设计</0 >。 </li>
- CUAV v5 docs
- CUAV Github库 </ul>