热校准和补偿
px4 包含校准和补偿速率陀螺仪、加速度计和气压传感器的功能, 以纠正传感器温度对传感器偏差的影响。
本主题详细介绍了 测试环境 和 校准过程。 最后是 实施过程 的描述。
At time of writing (June2019/PX4 v1.9) thermal calibration of the magnetometer is not yet supported.
测试设置/最佳实践
以下部分中描述的 校准程序 是在理想的 环境室(温度和湿度受控的环境)中进行的,因为电路板被从最低温度加热到最高运行/校准温度。 在开始校准之前,首先将电路板 冷却(冷却至最低温度并使其达到平衡)。
对于冷却,您可以使用普通的家用冰箱达到 -20C,商用冰箱可以达到 -40C 的量级。 电路板应放在带有硅胶干燥剂包的拉链/防静电袋中,电源线通过密封孔引出。 冷却后,可将袋子移至测试环境,并在同一袋中继续测试。
The bag/silica is to prevent condensation from forming on the board.
可以在没有商业级环境室的情况下执行校准。 可以使用具有非常小的内部空气体积的泡沫塑料盒来创造一个简单的环境容器。 这允许自驾仪将空气相对快速地自加热(确保盒子有一个小孔以平衡容器内外压力,但仍然能够在容器内加热)。
使用这种设置可以将电路板加热到约 70C 。 轶事证据表明,许多普通板可以加热到这个温度而没有不良副作用。 如有疑问,请与制造商核实安全操作的温度范围。
To check the status of the onboard thermal calibration use the MAVlink console (or NuttX console) to check the reported internal temp from the sensor.
校准过程
PX4 支持两种校准过程:
板外校准更复杂,速度更慢,但需要更少的测试设置知识,更容易验证。
板载校准过程
板载校准完全在设备上运行。 它需要知道测试设置中可达到的温升量。
执行板载校准:
- 确保在校准前设置机架类型,否则在设置飞控板时校准参数将丢失。
- 为电路板供电并将
SYS_CAL _ *参数设置为 1,以便在下次启动时启用所需传感器的校准。 1 - 将 SYS_CAL_TDEL 参数设置为板载校准器完成所需的温升度数。 如果此参数太小,则校准将提前完成,并且校准的温度范围将不足以在电路板完全预热时进行补偿。 如果此参数设置得太大,则板载校准器将永远不会完成。 在设置此参数时,应考虑到电路板自加热导致的温度升高。 如果传感器的温升量未知,则应使用板外校准方法。
- 将 SYS_CAL_TMIN 参数设置为您希望校准器发挥作用的最低温度数据。 更低的冷却温度能够用于减少冷却时间,同时保持对校准最低温度的控制。 如果校准器温度低于此参数设置的值,则不会使用传感器的数据。
- 将 SYS_CAL_TMAX 参数设置为校准器起作用的最高起始传感器温度。 如果起始温度高于此参数设置的值,校准将退出并报告错误。 注意,如果不同传感器测量的温度的差异超过
SYS_CAL_TMAX和SYS_CAL_TMIN的差值 ,则校准将不可能启动。 - 断开电源并将电路板冷却至低于
SYS_CAL_TMIN参数指定的起始温度。 请注意,在校准开始之前启动过程有10秒的延迟,以允许所有传感器稳定,并且传感器在此期间会内部发热。 - 保持电路板静止2,接通电源并加热到足够高的温度,以达到由
SYS_CAL_TDEL参数指定的温升。 校准期间,完成百分比将打印到系统控制台。 3 - 校准完成后,断开电源,让电路板冷却到校准范围内的温度,然后再执行下一步。
- 通过系统控制台使用
commander calibrate accel指令或通过 QGroundControl ,执行6点加速度校准。 如果首次设置电路板,则还需要执行陀螺仪和磁力计校准。 - 在任何传感器校准之后的首次飞行之前,电路板必须重新上电,因为校准带来的突然的偏移变化可能会扰乱导航估计器,并且某些参数直到下次启动时才会被使用它们的算法加载。
板外校准过程
使用在校准测试期间收集的数据在开发计算机上运行板外校准。 该方法提供了一种可视化检查数据和曲线拟合质量的方法。
执行板外校准:
- 确保在校准前设置机架类型,否则在设置飞控板时校准参数将丢失。
- 上电并将参数
TC_A_ENABLE,TC_B_ENABLE和TC_G_ENABLE设置为1。 - 将所有 CAL_GYRO * 和 CAL_ACC * 参数设置为默认值。
- Set the SDLOG_MODE parameter to 2 to enable logging of data from boot.
- Set the SDLOG_PROFILE checkbox for thermal calibration (bit 2) to log the raw sensor data required for calibration.
- Cold soak the board to the minimum temperature it will be required to operate in.
- Apply power and keeping the board still 2, warm it slowly to the maximum required operating temperature. 3
- Remove power and extract the .ulog file.
Open a terminal window in the Firmware/Tools directory and run the python calibration script script file:
sh python process_sensor_caldata.py <full path name to .ulog file> This will generate a.pdf file showing the measured data and curve fits for each sensor, and a .params file containing the calibration parameters.
- Power the board, connect QGroundControl and load the parameter from the generated .params file onto the board using QGroundControl. Due to the number of parameters, loading them may take some time.
- After parameters have finished loading, set
SDLOG_MODEto 1 to re-enable normal logging and remove power. - Power the board and perform a normal accelerometer sensor calibration using QGroundControl. It is important that this step is performed when board is within the calibration temperature range. The board must be repowered after this step before flying as the sudden offset changes can upset the navigation estimator and some parameters are not loaded by the algorithms that use them until the next startup.
实施细节
校准是指在一系列内部温度范围内测量传感器值的变化,并对数据进行多项式拟合以计算可用于校正传感器数据的一组系数(存储为参数)的过程。 补偿是指使用内部温度来计算偏移量,传感器读数将减去这个偏移量,以校正随温度变化的偏移量的过程。
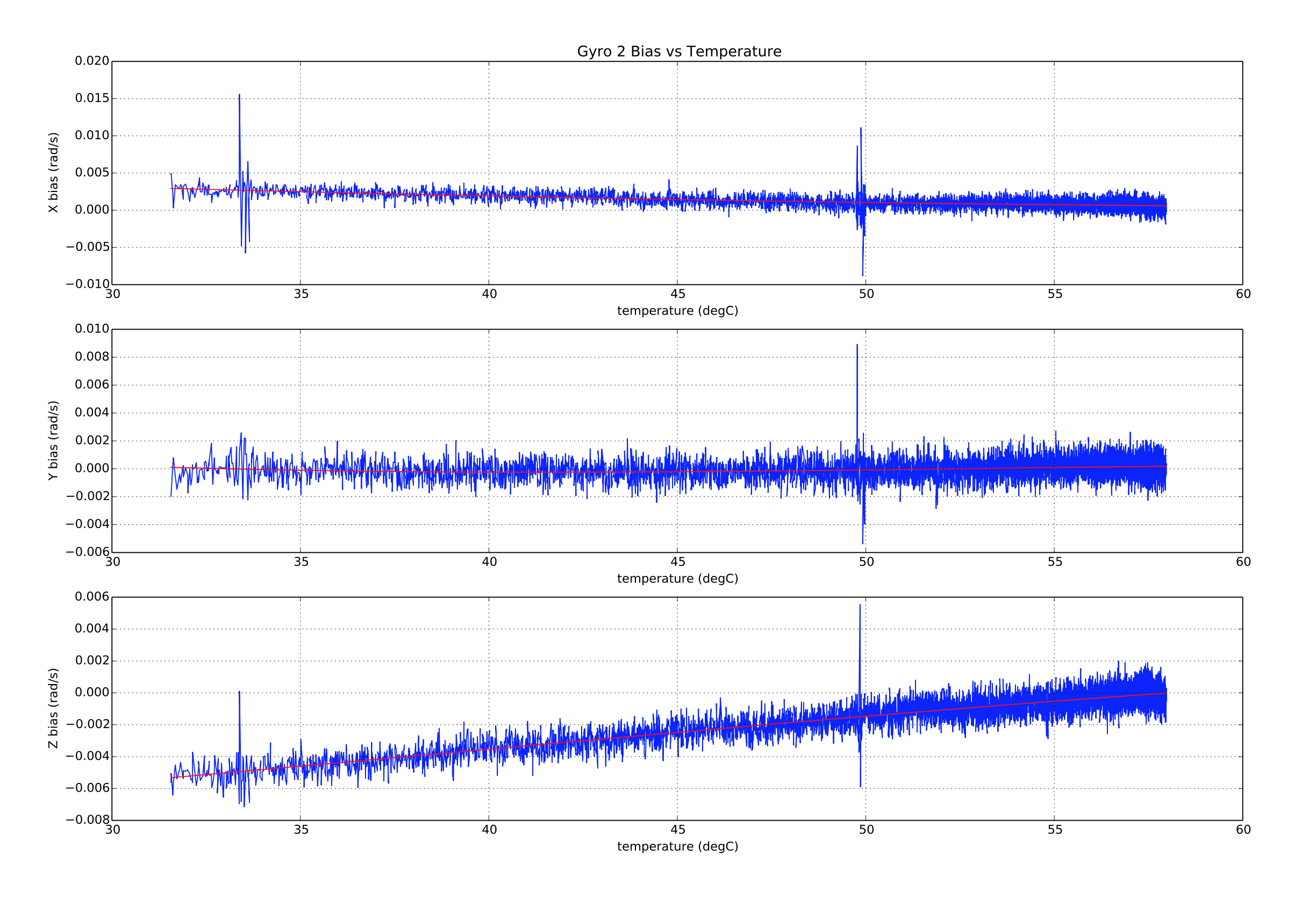
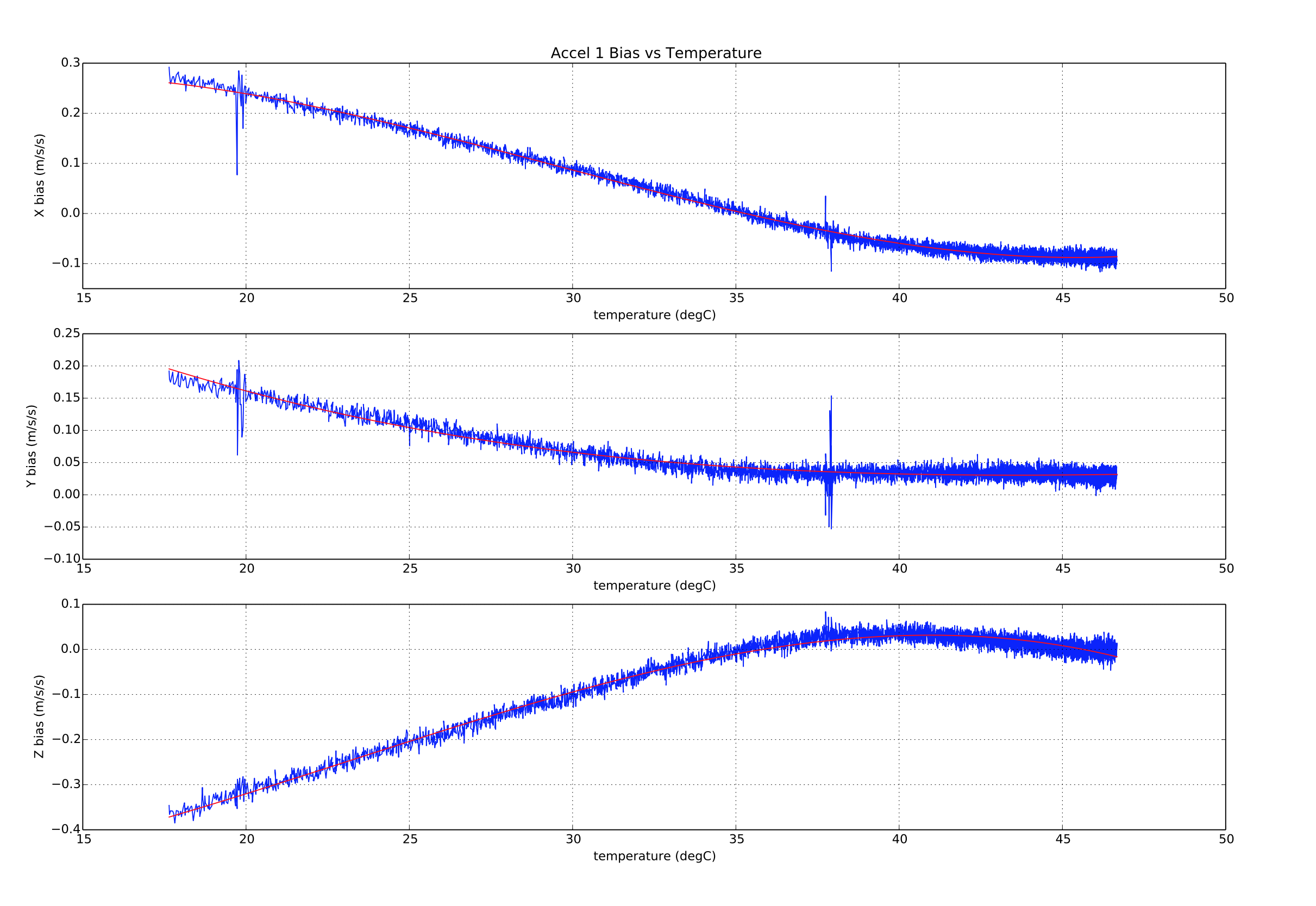
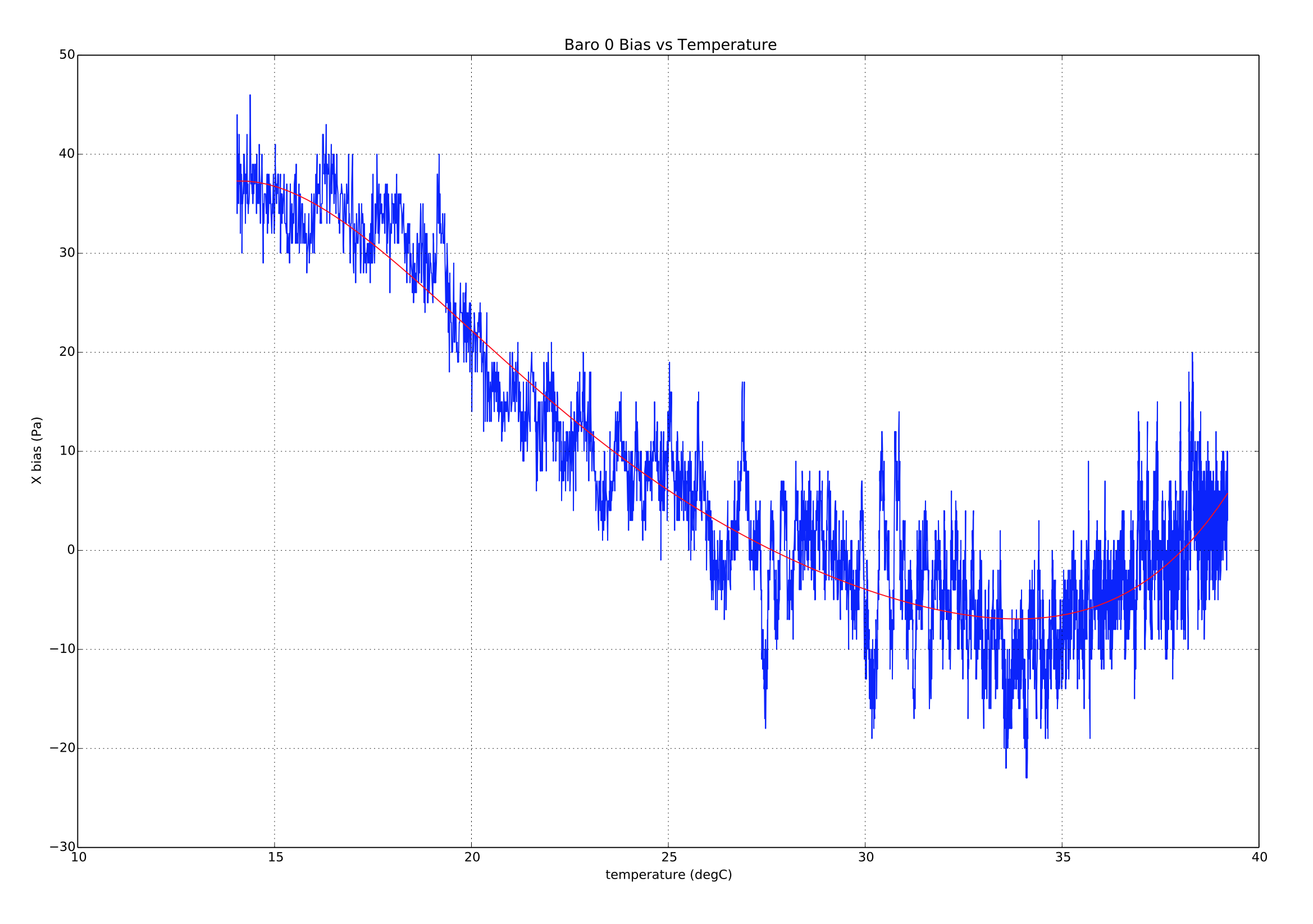
使用三阶多项式计算惯性速率陀螺仪和加速度计传感器偏移,而使用五阶多项式计算气压传感器偏移。 示例拟合如下所示:
校准参数存储
对于现有的参数系统实现,我们仅限于将结构中的每个值作为单独的条目存储。 为了解决这一限制,对 热补偿参数 使用了以下逻辑命名约定:
TC_[type][instance]_[cal_name]_[axis]
其中:
type:表示G=速率陀螺仪、A=加速度计和B=气压计的传感器类型。instance:是一个整数 0、1或2 ,允许至多校准三个相同type的传感器。cal_name:是标识校准值的字符串。 它具有可能的值如下:Xn:多项式系数,其中n是系数的阶数,例如X3* (temperature - reference temperature)**3。SCL:比例(缩放)系数TREF:参考温度(deg C)。TMIN:最低有效温度(deg C)。TMAX:最高有效温度(deg C)。
axis:是一个整数0,1或2,指示校准数据为飞控板参照系的 X,Y 或 Z 轴。 对于气压传感器,省略axis后缀。
示例:
- TC_G0_X3_0 是第一个陀螺 x 轴的
^3系数。 - TC_A1_TREF 是第二个加速度计的参考温度。
校准参数使用
The correction for thermal offsets (using the calibration parameters) is performed in the sensors module. 测量温度中减去参考温度,得到一个 delta 温度,其中:
delta = measured_temperature - reference_temperature
然后使用 delta 温度来计算偏移量,其中:
offset = X0 + X1*delta + X2*delta**2 + ... + Xn*delta**n
然后使用偏移量和温度比例(缩放)系数来校正传感器的测量,其中:
corrected_measurement = (raw_measurement - offset) * scale_factor
如果温度超过 *_TMIN 和 *_TMAX 参数设置的测试范围,则所测温度将被裁剪以保持在限制范围内。
通过分别将 TC_A_ENABLE、TC_B_ENABLE 或 TC_G_ENABLE 参数设置为 1,可以对加速度计、气压计或速率陀螺仪数据进行校正。
与遗留 CAL* 参数和 commander 控制校准的兼容性
传统的不知道温度的 PX4 速率陀螺和加速度计传感器的校准是由 commander 模块进行的,包括调整偏移量,在加速度计校准的情况下,比例(缩放)系数校准参数。 偏移量和比例系数参数被应用在每个传感器的驱动程序中。 这些参数出现在 CAL parameter group 中。
板载温度校准由 events 模块控制,在 sensor combined 的 uORB 主题发布之前,在传感器模块内进行校正。 这意味着,如果使用热补偿,在执行热校准之前所有相应的遗留偏移量和比例系数参数必须设置为默认值(零或单位 1)。 如果执行板载温度校准,这将自动完成,但是,如果正在执行板外校准,则重要的是在记录校准数据之前重新设置遗留的 CAL*OFF 和 CAL*Scale 参数。
陀螺热补偿是通过将 TC_G_Enable 参数设置为 1 来实现的,此时仍可进行 commander 控制的陀螺标定,但它将用于将补偿曲线上下偏移,使角速度偏移为零。 它通过调整 X0 系数来实现这一点。
如果已通过将 TC_A_ENABLE 参数设置为 1 启用加速度热补偿,则仍可以执行 commander 控制的 6 点加速度校准,但是,并非调整 CAL 参数组中的 *OFF 和 *Scale 参数,这些参数被设置为默认值,而热补偿 X0 和 SCL 参数将被调整。
局限
由于在不同温度下测量比例系数存在困难,因此假定比例系数是不随温度变化的。 这就限制了加速度计校准对于具有不稳定比例系数的传感器模型的适用性。 理论上,在热室或 IMU 加热器中能够将 IMU 内部温度控制在一定程度内的情况下,可以进行一系列 6 面加速度计的校准,并对加速度计进行偏移和比例修正。 由于集成所需的电路板硬件变动与校准算法的复杂性,这一功能还没有包括在内。
1. 当校准开始时,SYS_CAL_Accel、SYS_CAL_Baro 和 SYS_CAL_GYRO 参数重置为 0。 ↩
2. 气压传感器偏置的校准需要一个稳定的气压环境。 由于天气的原因,空气压力变化缓慢,建筑物内部的气压会因室外风的波动和暖通空调系统的运行而迅速变化。 ↩
3. 在加热冷却板时必须小心,以避免在某些情况下在板上形成凝结物,导致电路板损坏。↩{.footnote-backref} ↩