Hex Cube Black Flight Controller
The Hex Cube Black flight controller (previously known as Pixhawk 2.1) is a flexible autopilot intended primarily for manufacturers of commercial systems. 它基于 Pixhawk 项目 的 FMUv3 开放硬件设计,在 NuttX 操作系统上运行 PX4。

The controller is designed to be used with a domain-specific carrier board in order to reduce the wiring, improve reliability, and ease of assembly. For example, a carrier board for a commercial inspection vehicle might include connections for a companion computer, while a carrier board for a racer could includes ESCs form the frame of the vehicle.
Cube includes vibration isolation on two of the IMU's, with a third fixed IMU as a reference / Backup.
This autopilot is supported by the PX4 maintenance and test teams.
主要特性
- 32bit STM32F427 Cortex-M4F® core with FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2 MB Flash (fully accessible)
- 32 bit STM32F103 failsafe co-processor
- 14 PWM / Servo outputs (8 with failsafe and manual override, 6 auxiliary, high-power compatible)
- Abundant connectivity options for additional peripherals (UART, I2C, CAN)
- Integrated backup system for in-flight recovery and manual override with dedicated processor and stand-alone power supply (fixed-wing use)
- Backup system integrates mixing, providing consistent autopilot and manual override mixing modes (fixed wing use)
- Redundant power supply inputs and automatic failover
- External safety switch
- Multicolor LED main visual indicator
- High-power, multi-tone piezo audio indicator
- microSD card for high-rate logging over extended periods of time
Where to Buy
- The Cube (ProfiCNC)
Specifications
Processor
- 32bit STM32F427 Cortex M4 core with FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2 MB Flash (fully accessible)
- 32 bit STM32F103 failsafe co-processor
Sensors
- TBA
Interfaces
- 5x UART (serial ports), one high-power capable, 2x with HW flow control
- 2x CAN (one with internal 3.3V transceiver, one on expansion connector)
- Spektrum DSM / DSM2 / DSM-X® Satellite compatible input
- Futaba S.BUS® compatible input and output
- PPM sum signal input
- RSSI (PWM or voltage) input
- I2C
- SPI
- 3.3v ADC input
- Internal microUSB port and external microUSB port extension
Power System and Protection
- Ideal diode controller with automatic failover
- Servo rail high-power (max. 10V) and high-current (10A+) ready
- All peripheral outputs over-current protected, all inputs ESD protected
额定电压
Pixhawk can be triple-redundant on the power supply if three power sources are supplied. The three rails are: Power module input, servo rail input, USB input.
正常运行最大额定值
Under these conditions all power sources will be used in this order to power the system
- Power module input (4.8V to 5.4V)
- Servo rail input (4.8V to 5.4V) UP TO 10V FOR MANUAL OVERRIDE, BUT AUTOPILOT PART WILL BE UNPOWERED ABOVE 5.7V IF POWER MODULE INPUT IS NOT PRESENT
- USB power input (4.8V to 5.4V)
绝对最大额定值
在以下条件下,系统不会获得任何供电(不可运行),但不会损坏。
- Power module input (4.1V to 5.7V, 0V to 20V undamaged)
- Servo rail input (4.1V to 5.7V, 0V to 20V)
- USB power input (4.1V to 5.7V, 0V to 6V)
Pinouts and Schematics
Board schematics and other documentation can be found here: The Cube Project.
All other Cube documentation, including pinouts can be found at docs.cubepilot.org (e.g. Cube Module Overview, Mini Carrier Board etc.).
Serial Port Mapping
| UART | Device | Port |
|---|---|---|
| UART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | TELEM1 (flow control) |
| USART3 | /dev/ttyS2 | TELEM2 (flow control) |
| UART4 | ||
| UART7 | CONSOLE | |
| UART8 | SERIAL4 |
Ports
Top-Side (GPS, TELEM etc)
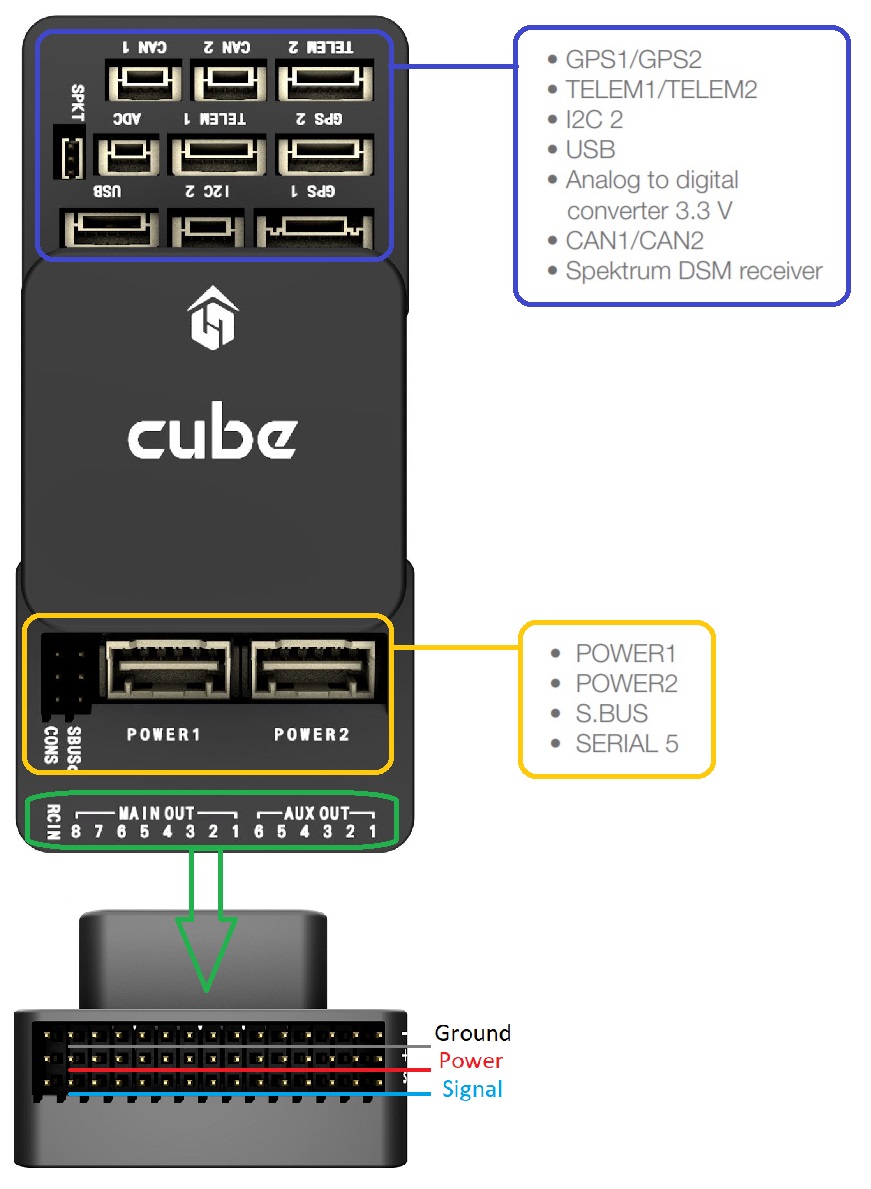
Serial Ports
The serial port mappings are as below:
- GPS1:/dev/ttyS3
- TEL1: /dev/ttyS1
- TEL2: /dev/ttyS2
- TEL4: /dev/ttyS6 (ttyS4 UART) > Note
TEL4is labeled asGPS2on Cube.
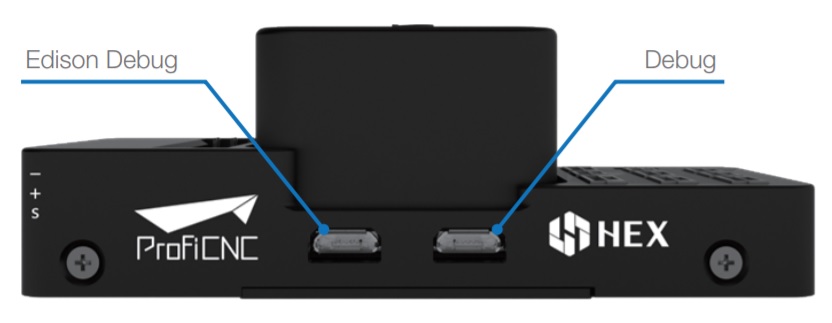
Debug Ports
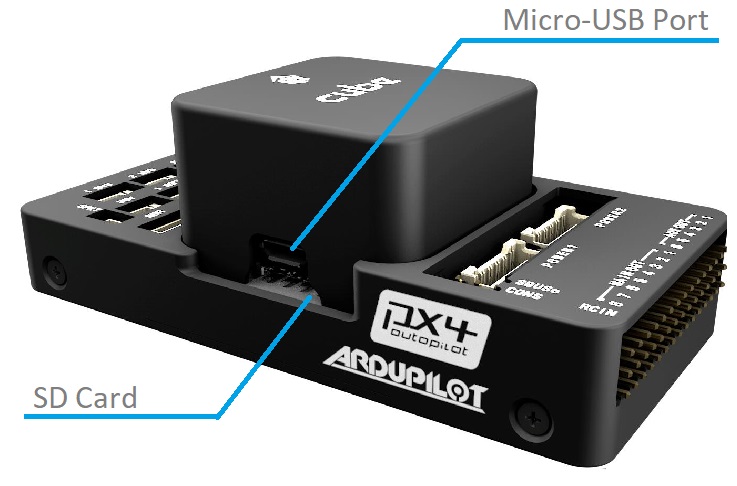
USB/SDCard Ports
Building Firmware
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make px4_fmu-v3_default
Issues
CAN1 and CAN2 silk screen on the Pixhawk 2.1 are flipped (CAN1 is CAN2 and vice versa).